Like so many other people, I am have a nostalgic pull to LEGO sets that were released during my childhood. I, however, make the sometimes poor decision to try and update them using newer parts and building techniques. Set 8062 from 1994 was a unique little set in that it came with instructions for multiple builds and a carrying case. I never had the set, but the helicopter and grabber truck always caught my attention.
As I try to add features to an updated set, I used the main rotor design I have used before. This simple design allows for collective movement of three rotor blades. It’s a simple design, but was a little tricker for two rotors while trying to keep the cabin free of interruptions. A HOG is placed on the left of the helicopter to spin the blades.
Like the original, a rear ramp is controlled by the HOG of the right of the helicopter. I also added a landing gear that retracts, which is controlled on the left. The front wheel is on a caster, and the rear wheels are fixed. I used many of the panel parts that have been released since 1994 for the body work, and kept the black and yellow livery.
This was simple and relatively quick build, but in the end, it seemed to be missing the look of the original. I think much of it comes down to the shape of the nose. To get the front rotor to fit with the rear rotor, I had to push it forward in such a way that the front windscreen needed to be a little more steep than 8062 was. But all the functions worked well which is always gratifying. I hope you enjoy.
The alternative build is becoming a popular theme in the current LEGO culture, and LEGO Technic is no different. Many people buy a set or two, and look for ideas what to make with the sets they have purchased. Rebrickable has made this even easier. Certainly I would like to share some of my creativity with them, but I also like the challenge of trying to design a creation with a limited amount of parts. I have built a couple of alternative builds now, so I wanted to try something a little bigger. LEGO set 42154 is a good size, has a lot of fun parts, and has a beautiful dark blue color. I love any Porsche, so I stared with a 911.
When I do an alternative build, I start with the big parts first: namely where do the panels go. For 42154 this meant I started with the fenders, the door panels, and the transparent panels. After a quick draft, I knew I would be able to get the general shape of the 911 right.
Then I worked on the interior. The car would keep a four wheel independent suspension setup with steering at the front. A flat 6 engine was mounted at the rear with drive connected through a differential between the rear wheels. I was able to keep the HOG steering link on top of the roof. Two seats are include, but no jump seats.
It took some time working on all the remaining parts. 42154 does not have many liftarms, so I had to design and redesign what parts are used where a couple of times. At the end, I had a lot of parts leftover, so I was able to make two rear end designs: a rear wing, and a little duckbill spoiler (my favorite 911 look). Both are easily interchangeable.
I was pleased to have finished another alternative build. They are hard for me to complete, but a good exercise in working with constraints. I like the way this one turned out, as I like the stance and the proportions of the design. The size is right for my desk, and the dark blue looks great in LEGO. Plus any 911 is a good 911 in my mind.
I go through stages of inspiration like so many other builders, and sometimes when I idea is working, you just need to follow where it leads. I had the idea to do a little 15 module wide sedan, and after a simple little draft looked like a boxy, old sedan, I decided to embrace that direction. From there I determined, with a little bit of effort, I could turn this little sedan into a trio of MOCs.
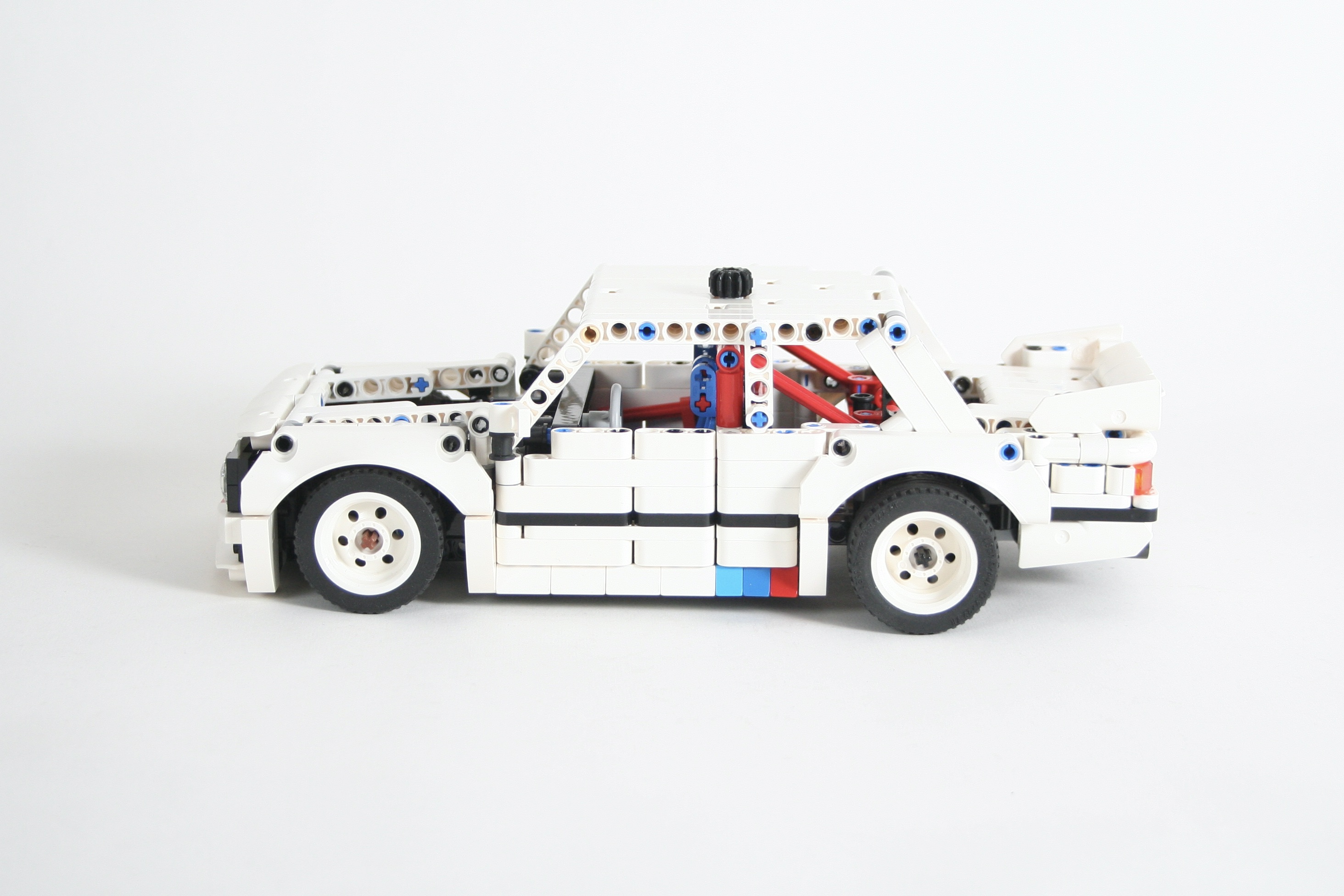
Like many a car enthusiast, I have a soft spot for BMW sports sedans of the past. The E30 translates to LEGO well as that generation 3 Series is a little bit boxy, and has some great fender flairs. I started with a sedan in Red, and the project expanded quickly. As suggested by LEGO set 42138 Shelbey GT500 Mustang, I was convinced that every 15 wide car going forward should have a half stud front axle drop to give the car a little forward leaning stance. I was able to develop a steering system that would work well for this, which would also give space for an engine. I used the standard axle based V-8 for the sedan, and gave it a spoiler that was just a little too big.
I loved the car so much, I couldn’t stop! I started making a lime version, and then I saw a Touring in my neighborhood, and decided this version would be a wagon. In lime! Then with a little more tinkering, I was able to change the V-8 for a Straight 6, like all perfect cars have. (Don’t tell your friends, but only 5 of the 6 pistons move) The chassis of the sedan and the wagon are the same.
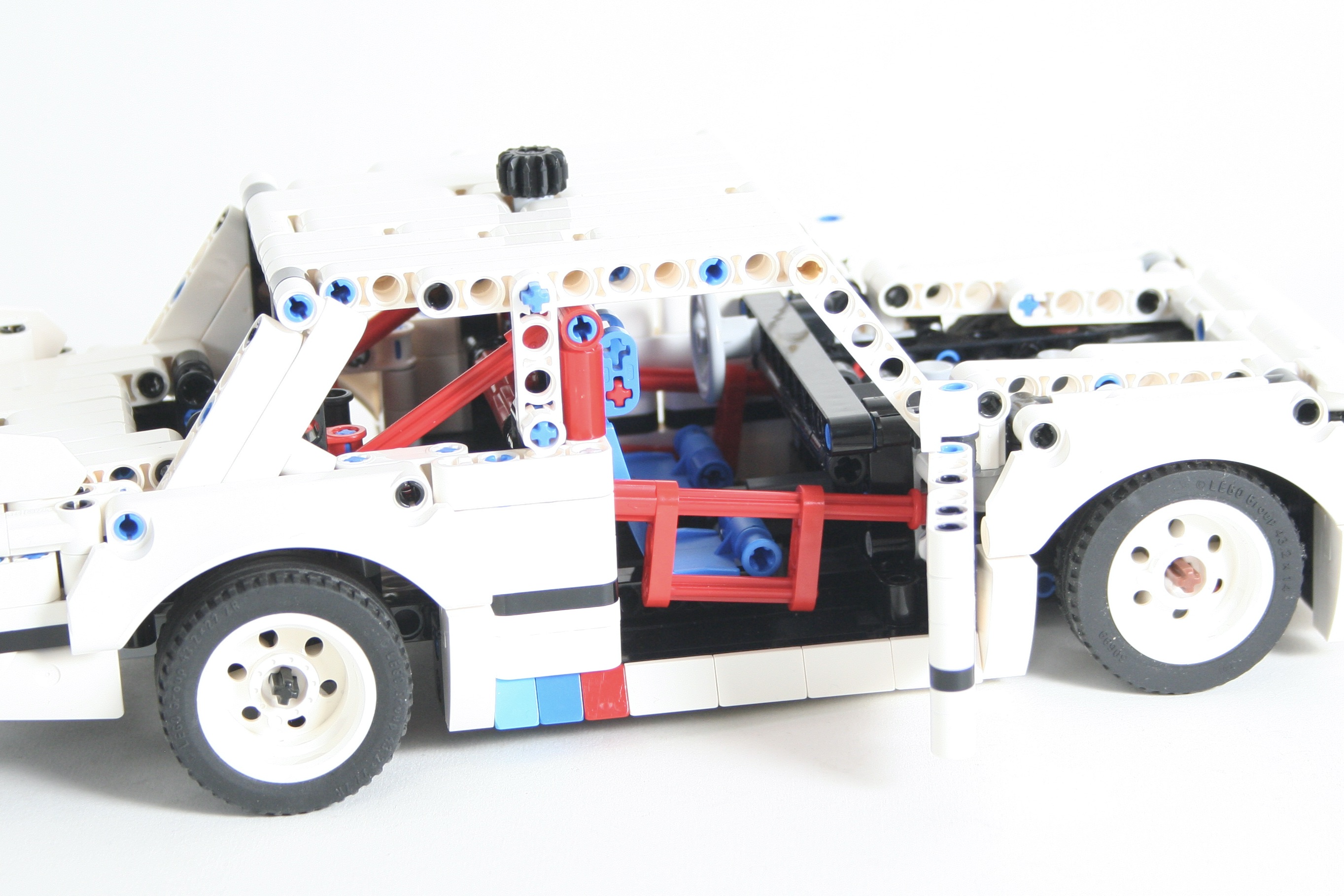
Finally, as BMW Motorsports has an iconic livery, I decided a racing version would be complete the group. This car is mostly the same, but the wheelbase is 1 module shorter, and features the I6 engine. And BWM racing colors. I added a little roll cage, and white wheels and took out a door.
This build is a fan favorite. When I presented these at a local show, many people came up and wanted to talk about the BWMs. They are simple, playable, highly robust, and visually interesting. I loved this build, and will be doing more cars at this scale. They are a lot of fun. Until next time,
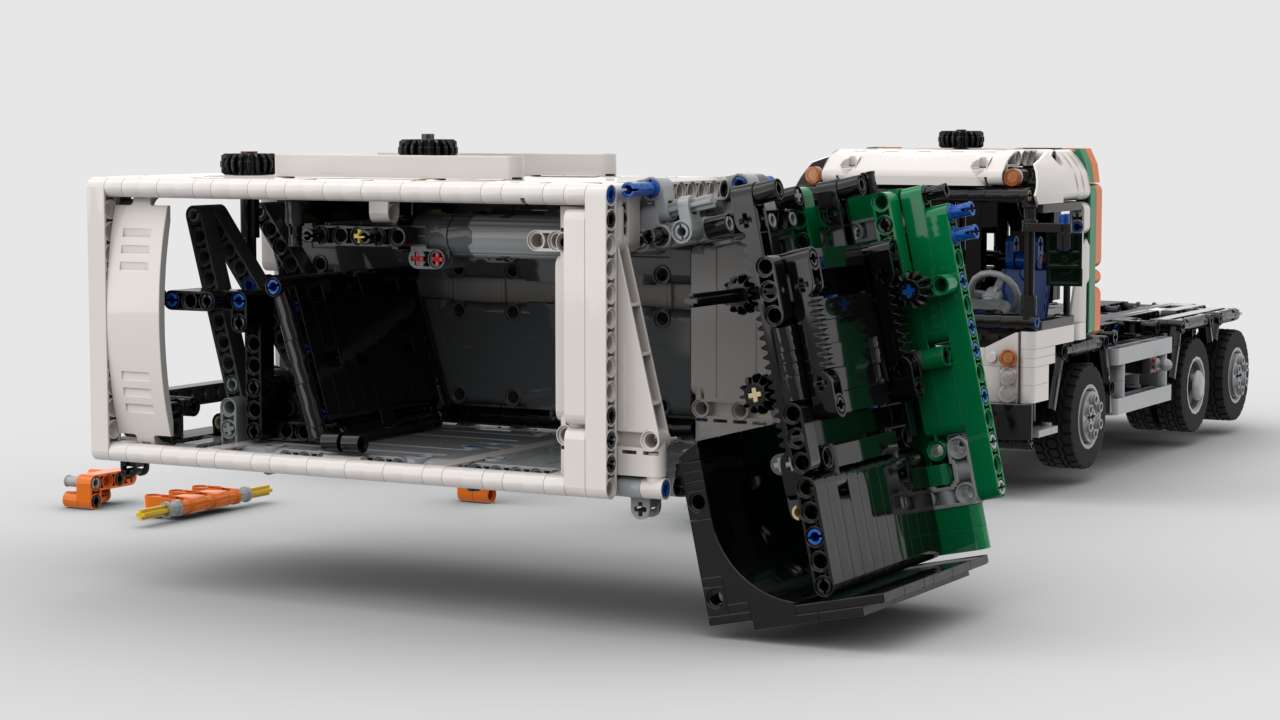
I like trucks, and I like building them. Garbage trucks are the most interested to me. Not only do they look interesting to my eyes, but mechanically they have a lot going on inside of them. Naturally, recreating this out of LEGO fits well with the type of building I enjoy. When I started on this project, I settled on a couple of standards. First, it would be 1:21 scale, second, it would be manually functioned, and finally, it would be a rear loader.
I worked on this model differently than I normally do. Generally I design a crude frame, and place all the mechanical aspects on this frame, and slowly build out the rest of model until it is done. On the garbage truck, I worked on three sections on the build in tandem: the chassis, the body, and the compactor.
The compactor started first, and was the hardest to get right. I settled on a function that is controlled by one gear on the left of the truck. The gear moves the compactor door mount, and an interval resistance gear allows for movement of the compactor plate. The one gear controls the two movements. So when trash is added to the hopper, moving the gear extends the door down, pivots the plate, moves the door up, and then pivots the plate open again.
The body was started soon, and would need to work hand in hand with both the compactor and the chassis. The body would house both the extractor plate to push trash out of the truck, and the mechanism to pivot the compactor up to open. These two functions were simple to design, but what took the most time was making sure the body was strong to support the functions and the rear compactor, and to be smooth internally to make sure trash would not get stuck.
The chassis followed a more common building process. I started with the hardpoints like the wheelbase, length and engine placement, and slowly added in all the other parts needed. Right from the beginning I decided on a three axle chassis with axle 1 and axle 3 steering. Axle 2 would be the drive axle. As I built, it was clear there was a lot of extra space in the chassis. I added a little hybrid/EV drive to fill the space. The torque from the drive axle routes through a center differential that splits the torque between a fake electric motor and a fake piston engine. A resistance plate is added to the front of the piston engine so the torque will always start with the electric motor. When the speed increases, the torque will overwhelm the resistance plate and start using the fake piston engine too. It works just like a real hybrid engine. A selector is on the left side of the truck to select EV only where only the electric motors is used, or to select hybrid where both are used.
The truck and body are easily connected by four pins at the corner of the body. The cab tilts to make it easy to work on the engine. Finally, I created two small dumpsters for to hold trash. A small one and a larger one, and each fits with on the rear of the truck.
This ended up being one of my favorite models since the Ionos. The truck looks great, but packs lots of functional elements. The hybrid function works great and will be used again for another project. When I presented it at a show people could not get enough of watching the trash get cycled through the compactor. I always enjoy building a garbage truck, and I look forward to the next one I make.
It was another busy year for me. When I look back on all the builds I did, I am surprised by how much I was able to produce. I spend some time building, and I do not feel like I spend all my free time building. I am cheating a little more these days by using components from one build in another to simplify the creation of another MOC. I posted instructions to Rebrickable for every build this year, and will continue to do so. I will try to keep posting some for free, and some for fee to support that incredible website.
I made good progress on my goals as well:
Finish the Garbage Truck (completed)
A 15 wide Unimog U5000 (yes, but on Januay 1, 2024)
Another alternative build (completed)
Another old set update (completed)
Some aircraft (completed)
A spaceship (completed)
A 15 wide car (completed)
For those of you counting at home, this is the first time I have completed all my goals!
As I noted last year, I am still fully committed to the small manual technic build. I’ll keep this going for as long as it works. I have some fun builds already started for 2024. There are some other responsibilities that may take me from building this year, but since this is a good outlet for me, I hope I can still make some fun creations.
For 2024, here are my goals:
A weird Unimog
A small Porsche
An alternative build
A little EV
Some construction vehicle
A 15 wide truck
Finally, keep this space updated with the builds I complete, as I complete them.
About once or twice a year, Eurobricks offers a Technic contest for builders all around the world to participate in a build challenge. This time, the theme was to build a space vehicle. Naturally I participated, because, 1) space is amazing, and 2) it gave me a chance to finally build something Blacktron. Like any builder who grew up in the 90s, classic LEGO space has a special place in my history, and for me specifically, Blacktron even more so.
I decided to make a little spaceship with a few features, and a fast look. Blacktron colors call for black, a little yellow, a trans-yellow canopy, and trans-red details. After the general shape was developed I placed a simple landing gear with two legs under each wing. This is controlled by a HOG above and behind the cabin. Second, I added a little pod that would be carried behind the cockpit, and could be lowered by another HOG behind the cabin. One pod is a cargo container, and the other is a little jail container.
The MOC looked perfect to my eyes with a fast look and just the right amount of greebling. The simple functions were enough for the size, and give it a nice bit of playability while maintaining appropriate swooshability. It turns out others agreed, as it won first place for the contest!
I am beginning to get more efficient in my builds. Many of the axles, drivetrains, and little mechanisms I have designed over the years are finding their ways into other builds. When I completed the Off Road Truck, it was clear there was a lot that could be turned into another build, rather quickly. The Off Road Truck had a great, strong chassis, a little fake engine, a working transmission, and a tipping bed. With a couple of changes it could turn into another truck.
I lengthened the chassis, and removed the crane. I added a longer bed and changed how the tipping function worked. The cab stayed the same for the most part, but I changed the grill to match the look of the Mercedes Benz 917 truck. Since much of the truck is the same as the Off Road Truck, this one still retains the I3 fake engine, the pendular rear suspension, rear wheel drive with two speed transmission, and the tilting cab. Two HOGs are on the roof, one for the steering, and one for the bed tipping function. The bed can tip in all three directions.
Sometimes these type of builds feel a little bit like cheating, as they use much of a previous build. But this little truck was a nice addition to my builds that is fun to play with and is easily built by others people who have a moderate Technic collection.
For the Eurobricks TC22 contest, Steph77 designed a little excavator that I loved. With their permission I asked if I could expand on the build, and turn it into my own creation. What attracted me to the design the simplicity of the digging arm, and of course the size. I also liked the inclusion of the fake engine on the superstructure. I rebuilt the arm, and started paying around with it.
I had just completed the Skid Excavator, so I was interested in building an excavator with similar features. The arm was already designed by Steph77, so I needed to decide where I wanted the HOG knobs to be. I decided on the main boom to be controlled on the side, and the secondary boom to be controlled by a fake air intake on the superstructure. This HOG would also power the fake I3 engine located on the rear of the superstructure. A light at the top of the cabin controls the slewing.
Then I built the chassis. A HOG gear is placed in the center of the superstructure, which controls the steering of all four wheels. Finally, a plow is added to the front of the chassis with a HOG on the back to control the up and down movement.
As I was getting ready to take the wheeled excavator apart, I thought “I could make another MOC easily by creating a tracked chassis.”
So a couple of hours later, and I built another little chassis. The superstructure is unchanged. Since no steering is needed on the tracked chassis, I used the same HOG placement that was used for the steering of the wheeled chassis to control the plow movement.
I loved this build. I love interchangeable MOCs, and a yellow construction machine is always enjoyable to build and play with. I think I like the look of the tracked excavator better, but driving the wheeled excavator around is a lot more fun. I hope you enjoyed.
I tend to find new and flashy machines the most interesting, but sometimes something older can excite my creative juices. Someone suggested I build an old tractor, so this is the result. As I planned this build, it became clear that I wanted it to be part of the Thirdwigg Farm scale, so that determined the scale and some of the features right away. The Vintage tractor can be used with all the other Thirdwigg Farm builds.
I worked on the driveline which came together pretty quickly. The two cylinder engine is directly linked to the rear wheels. The steering was a little trickier. I mounted a little steering wheel on a linear actuator block, which moves a steering link to move the front steering rack. It is relatively simple, but coming up with how to make it work and look alright took a little bit of time. The seat is mounted on a pivot that allows for small suspension travel, just like an older tractor.
A little more time was spent on the bodywork. The round macaroni bricks work perfectly for the grill, and the new little panels cover the engine well. The fenders are a little fragile, but look great for the tires used.
This was a fun little build that has been well loved at shows and in my office. It turns out that an old looking tractor is something that generates some interest.
So it turns out that I have built a lot of MOCs over the years, and many of them have instructions posted on Rebrickable. Late last year, I recognized I was going to post my 100th MOC on Rebrickable, so I wanted to celebrate the occasion in some meaningful way. After a little thought, it became clear that building another Unimog was the only way to celebrate!
I have build a number of Unimogs over the years, but if one thing has happened during this time, it is the consolidation of the 1:21 scale truck that has become a standard in the LEGO MOC community. LEGO sets like 42098, 42078, and 42128 have helped to standardize the 1:21 scale truck, and many other MOCs have followed suit. Building a Unimog in this scale seemed like a good idea.
I planned right from the beginning that multiple implements would be available for the truck, so the design would need to be able to accommodate each attachment. To support this, a front, rear, and center PTO would be needed, and mounting points on the front, rear, and bed would need to be easily accessible. Once these standards were set, I measured the scale, and made a draft with all the set points fixed. As I built, the steering was finalized as well as the 2 cylinder fake engine. The truck used a rear wheel drive setup, and the rear axle has portal axles and a pendular suspension. Right above the rear axle, I placed a linear actuator to move the tipping bed. After some tinkering, I decided to use a large 36z gear on the left of the truck to move the bed up and down. It is placed just behind the steps, and looks like the left side radiator. Finally, there is a PTO on/off switch on the right of the truck that turns the rear and center PTO on and off.
As I was building the truck, I built the attachments as well, which allowed me to make sure the attachment connection points were ridged, accessible, and standardized. From the beginning I planned on the following attachments: plow, gritter, front winch, rear crane, and bed crane. The front attachments are connected using a 5l axle with stop, and the bed mounts are connected using four 3l axles with stop.
The front plow has worm gear lift and can tilt left and right. Free instructions for the plow may be found here. The rear gritter attaches at the rear and connects to the center PTO gear. When the PTO is turned on, the center auger and the rear spreader both turn. The top of the gritter can open to drop small 1×1 round plates to use as salt. Free instructions for the gritter may be found here.
The front winch and center crane and bed can be easily attached as well. The front winch has a locking mechanism that allows the winch to be locked as needed. The rear bed has a knuckleboom crane that folds up for transportation. Instructions may be found for both here.
Finally, a rear knuckleboom crane is also available. This crane uses the same crane as above, but uses a different attachment point. A small interior cam mechanism that is worm driven is used to connect the rear crane to the truck. Two outriggers are on both sides of the crane and are locked by worm gears as well. The crane folds completely and extends as needed. Again, free instructions for the crane can be found here.
Maybe I will find additional attachments, trailers, and implements for the truck but for now I am done. This project worked just a well as I had hoped and was perfect for my 100th MOC. The truck is just the right size, and has all the features I wanted it to have. The functions work well and integrate with each other well. Each attachment was great addition as well, and gave the truck lots of distinctive styles and looks. I hope you enjoyed the build as well.