JCB 930 Forklift
April 29, 2012 1 Comment
It was time for me to to make something that was a little smaller with a lot of functions. I kept driving by a JCB forklift on the way to work, and I thought I could make that. I wanted manual functions, including a working fork tilt and dual stage lift, working steering and drive, and a yellow bodywork.

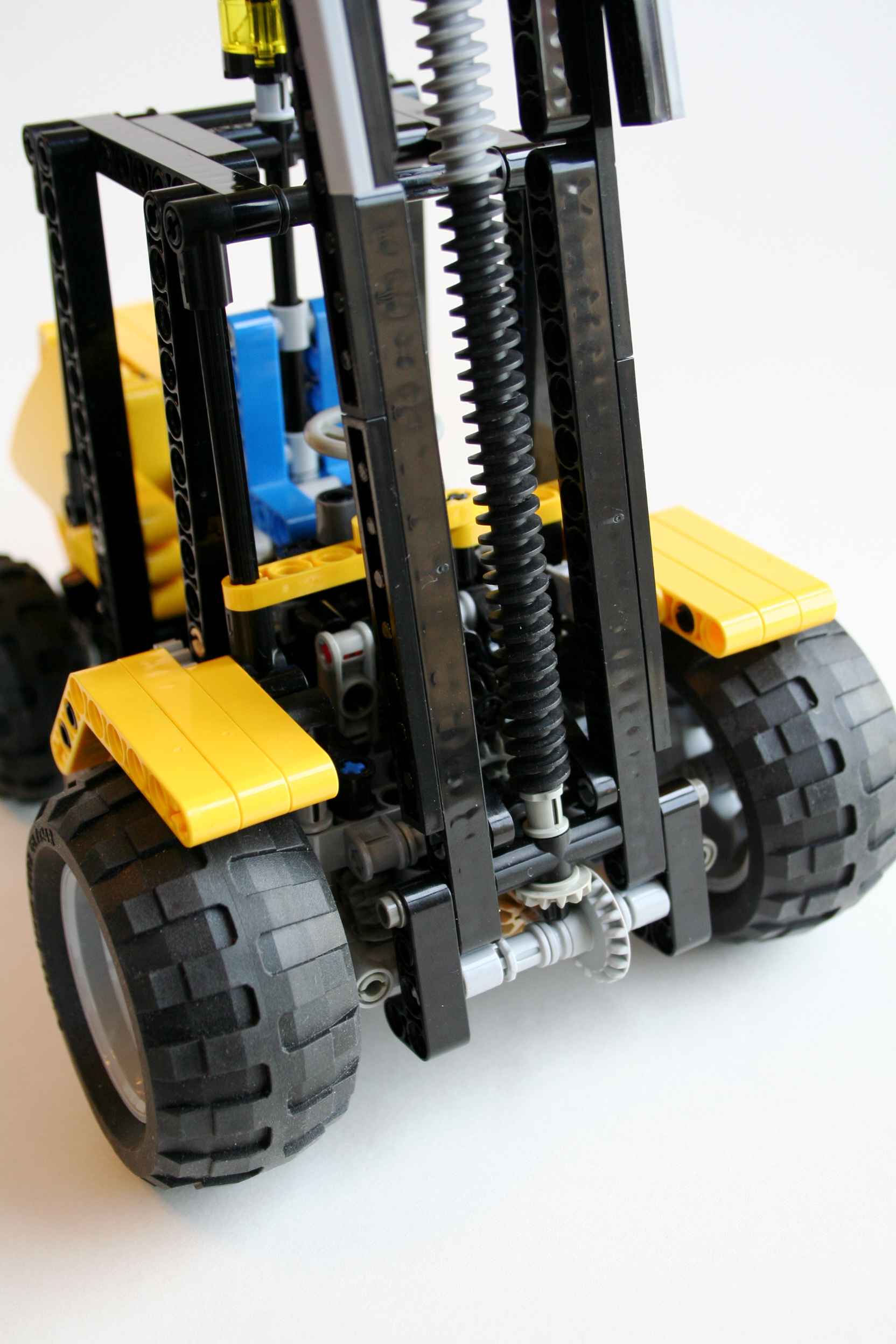
I always start with the hardest part of a model. For this model, that was the fork. I wanted to use a dual stage lift as to get the forks to a substantial height. This design would require a chain that would wrap over a moving frame, and connect on one side to the forks, and on the other side to the body. The moving frame would be moved by a screw, thereby lifting the forks. I used a number of worm gears on two 12l axles, connected through the bottom to move the moving frame. This setup allowed for a pivot point, and a lifting mecanism that would function much like the real JCB 930. The moving frame consisted of two rows of liftarms, and the forks tied everything together between the moving frame and the worm gears. A chain went up and over the full assembly to work move the forks as the moving frame was lifted. It works like this.
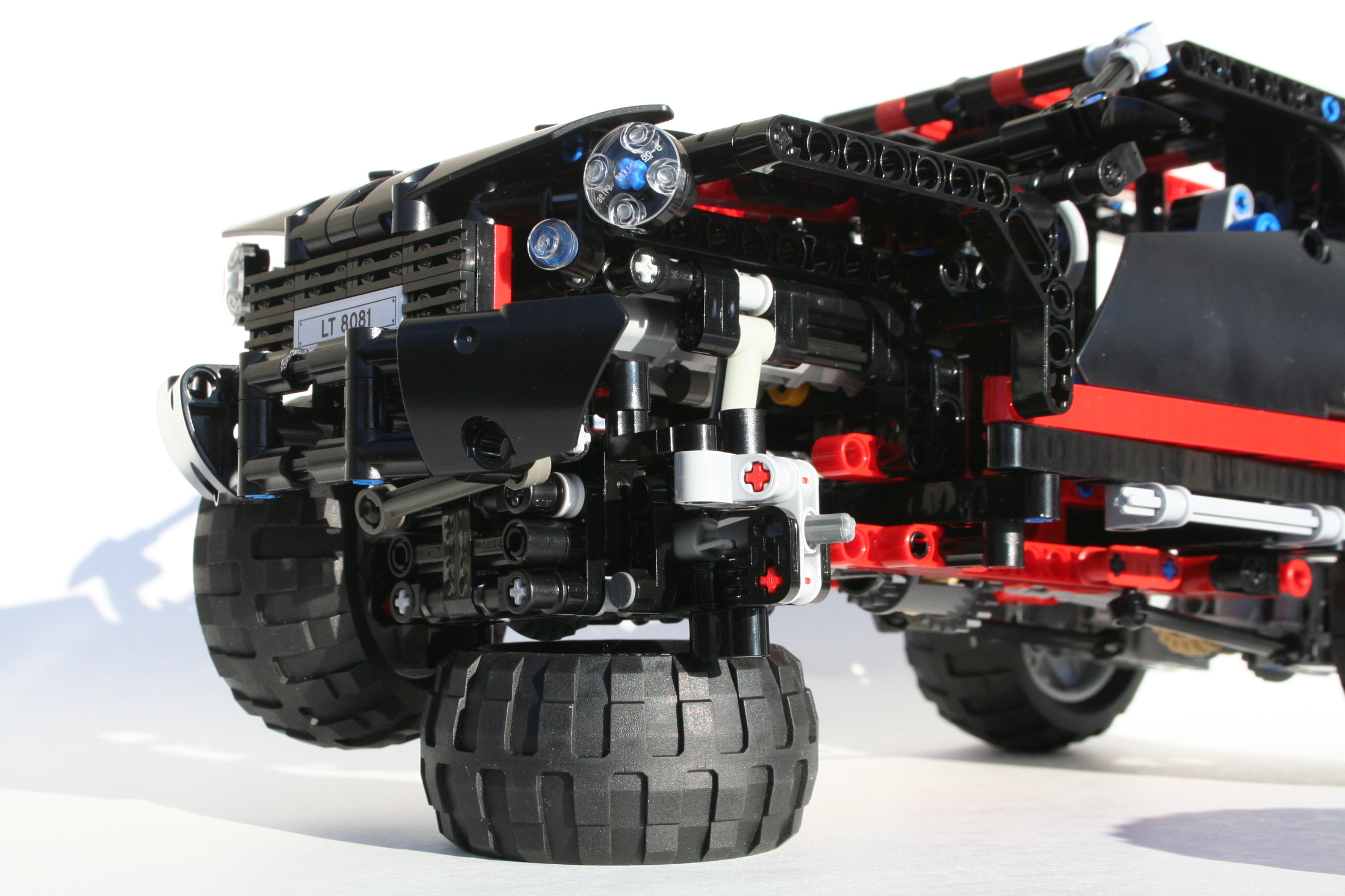
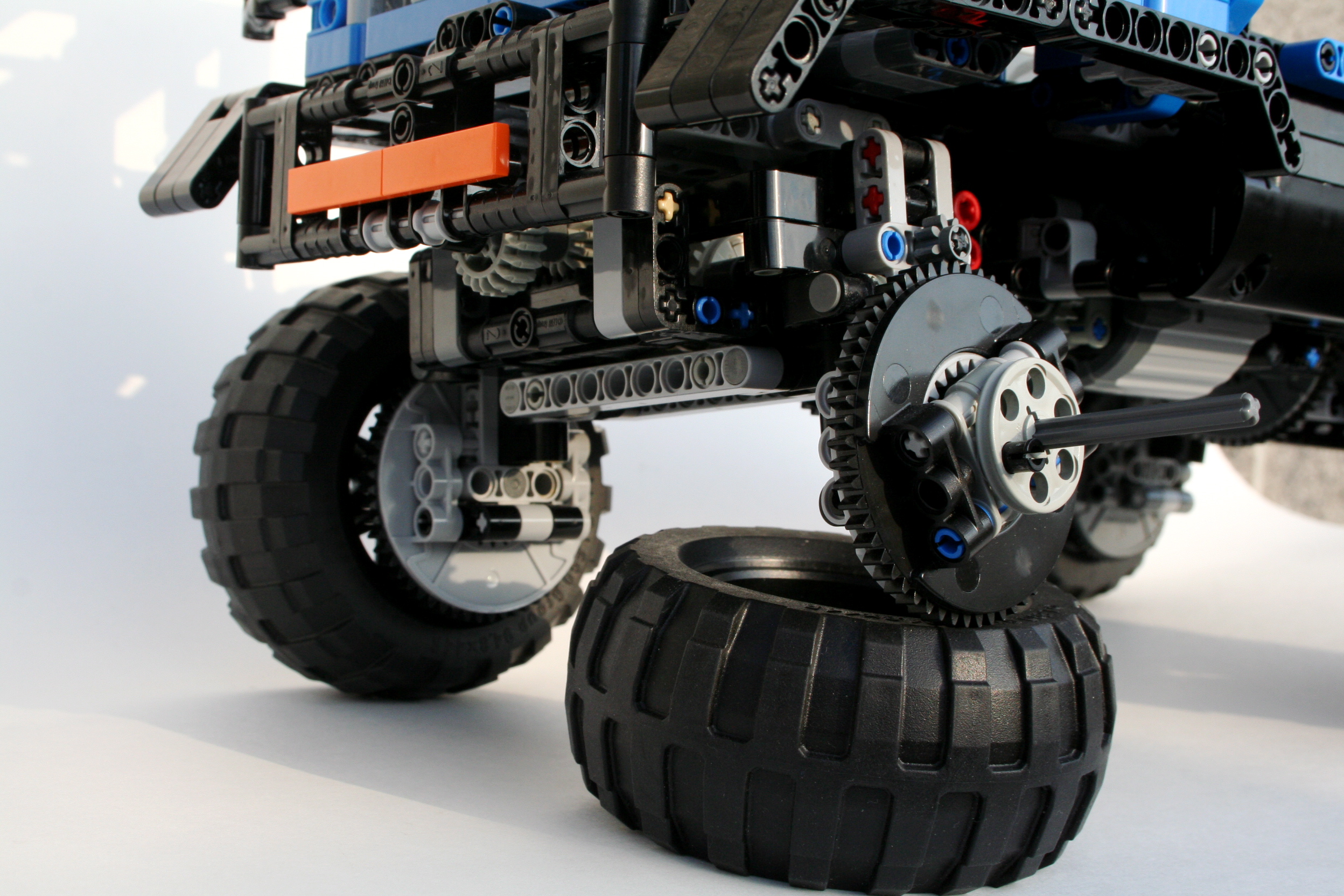
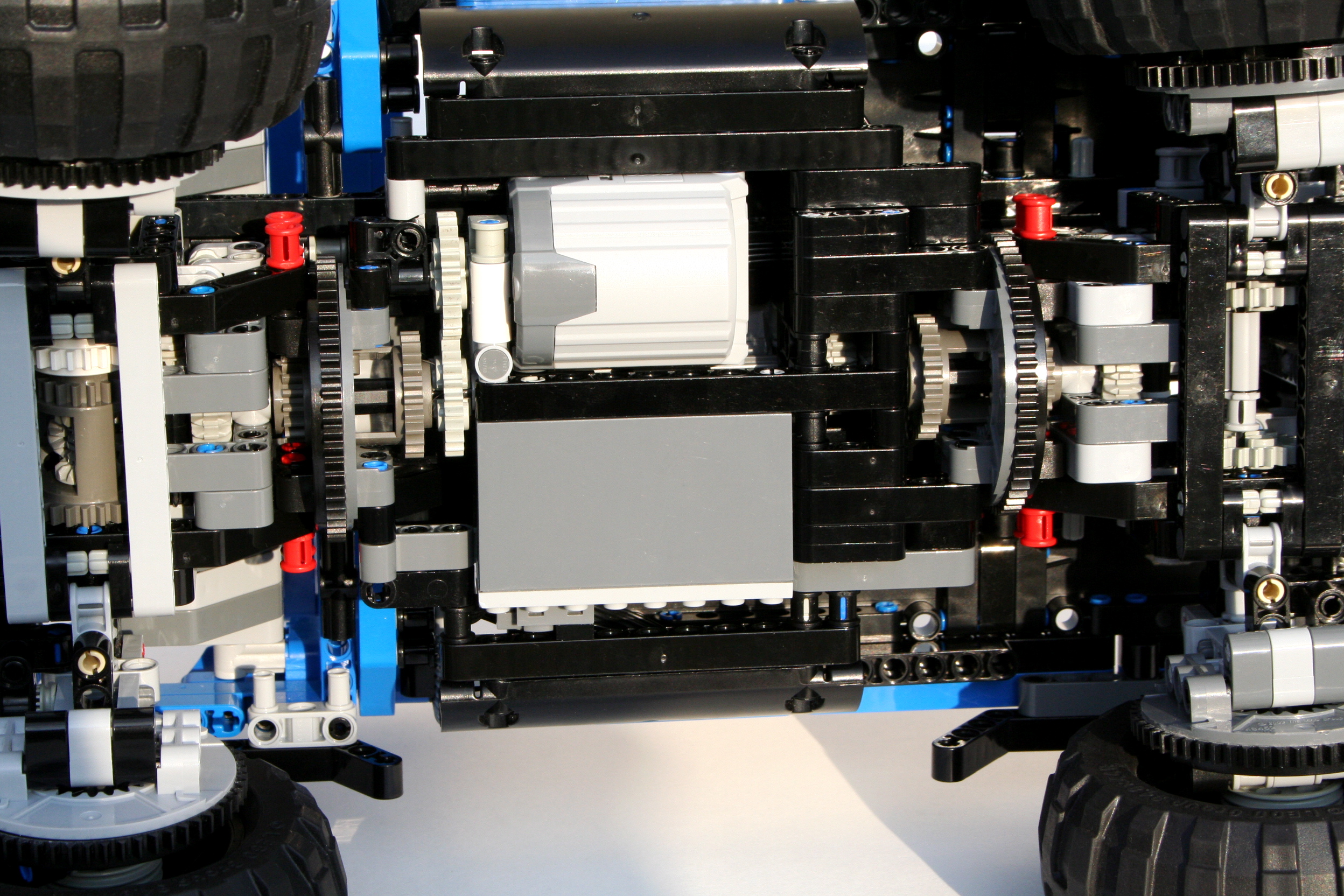
I then worked on the driveline. I added a 3 cylinder motor in the rear, driven by the front wheels, working to keep the functions out of the way of the fork mechanism. I added a steering axle on the rear, and gave it a pendular suspension setup. This allowed for some stability on uneven ground, while keeping the front wheels planted for the load as it had no suspension.
I then built the body after the JCB 930, and as I did, I added a tilt freature to the fork. This feature did not work too well, but it gave me the ability to adjust the pitch of the forks, which we a design requirement. It was not too stable. After a little work to the body, and a HOG steering link out the top of the cab, the model was done.
The model worked well, particularly the lift feature. I was a little disappointed with the tilt feature, as it was a little too wobbly. The drivetrain worked well, and the steering allowed for tight corners. The suspension give good stability, and offered a little bit of off-road prowess.
The full gallery is here.













































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}