Basically the whole point of this project was to make a mid scale truck that was orange. It seems like the only official LEGO sets I buy these days are the orange ones, so I have to use the parts for something. I found this nice little Arocs tipper truck, and I thought, that’s a great little idea. I started with the chassis which came together quickly. The two rear axles are connected via each differential, and drive a small 2 cylinder fake engine under the cab. The front two axles steer at different ratios, with a HOG gear going to the top of the cabin. A linear actuator is used to tip the bed, with controls on each side.
The tipper bed came together quickly, though I wished some additional parts were available in Orange. No problem, but in this age of LEGO Technic color proliferation, it would be nice to complete a color pallet before starting on another one. Anyway, the cab was little more tricky. Like many modern trucks, the grill is a rather unique. The Arocs uses four rows of little scoops with a large center star. Adding something similar on my truck required some creativity, and compromise. I fit only three rows, and recreated the scoops with cheese slopes. The top row was mounted level, and the two lower rows were mounted on hinge plates connected on the side of the cab.
The final model was sufficient, but not groundbreaking. It looks good enough; you can tell what it is, but it does not win any modeling contests. The steering worked great, as did the drivetrain. The tipper bed worked well, but required a little muscle at the early stage of tipping due to the leverage. The tilting cab worked well, but in its resting state was a little too loose. Maybe someday I will edit the grill to make it better, but for now, it works.
About 3 months ago I purchased a set of four Fischertechnik tires from ebricks.ru. After seeing a review of them by RM8, I reached out to him, and he mailed me a set. After a little time, I finally have something to show with them.
After playing with a number of ideas, I decided to do another Unimog. It’s easy to motivate myself to build a vehicle I love. This time, I wanted to do the unloved U90 (418) version. It was not a terribly successful version, as many find the hood…not one of the best. But few people have built this version, so I was up for it. I put to to a vote on Eurobricks, and the decision was to build it in green. Off I went.
The scale required a 27 stud wheelbase and a 19 stud width. I built the front and rear axles and tied them together. Through a couple of edits, I finally added the suspension and figured out how to get portal axles into the truck. The Power Functions XL motor was mounted just over and in front of the rear axle driving power to all four wheels. The Servo motor was placed directly ahead of the XL for the front axle steering. I added a four cylinder fake engine over the front axle. The rechargeable battery box was placed over the rear axle.
The suspension is a live axle setup, with four hard shock absorbers at each corner. Each wheel has about 2 studs of travel. Not much for a Unimog, but enough for a 418. At this point I started a draft of the cab, and a draft of the bed. At this point the truck had an identity crisis. Move forward with green or find another option.
Building LEGO Technic with green is not the easiest. The color lacks 1×5 and 1×11 beams. Both of the these parts would be needed for the bed and the cab. I could make some things work for the 1×11 in the hood, but there was no other option (read, inexpensive option) for the 1x5s needed for the bed. I toyed with other colors for the bodywork; orange, white, blue, yellow. None of them had the right pop I was looking for. Other than the orange, but, as other have said, orange has been done too many times. Then it dawned on me, “why not use plates?” I had my solution. With one bricklink order, I was done.
The truck drives well, and is easily controllable. The front portal axle can use a little strengthening, so serious trial abilities are lacking with this truck. Both the bed and the cab can be easily removed. I ran out of space for a ram to elevate the bed, but it can tilt three ways. I was pleased with how the truck turned out. It looks great. The driveline coule use some improvements, so I will make those improvements on the next truck.
My favorite vehicles to build are garbage trucks (Ok, maybe trial trucks). I enjoy the many functions that I can create. I enjoy the diversity of shapes, sizes and colors, and I enjoy how ubiquitous they are. But I have not built many. So it was time to fix that.
I was originally going to do a large scale truck, but as my temporal limitations are becoming ever more apparent, I decided to do something smaller this time. The 13 stud wide truck is popular in the Technic community, so I decided to go with that. I very much enjoy the Volvo FE, so that was my truck. Since my last truck was one with three axles and Power Functions, this one would have two axles and be manually controlled.
I searched high and low for garbage box that would work well: Gesink-Norba, Heil, McNeilius, EZ-Pak, Dennis-Eagle, Ros Roca. All required a compactor that would need a round base for the trash to collect. Curves are hard to do in LEGO. I had some trouble with refuse compaction cycle working well on the Axor due to the floor curve on the hopper. I wanted a compaction cycle that was more simple and more reliable. So I designed my own.
It’s dead simple.
There is a angled elevator in the hopper that goes straight up and down. The center gear on the outside of the hopper that moves the elevator. When refuse is placed on the elevator and lifted, the refuse will fall over an internal wall at the top of the cycle. The refuse falls into the compaction bin, until the rear hopper is opened. Bigger parts sometimes gets stuck on the cross axle.
Inside the compaction bin, is an extraction plate. Turn the gear down near the front left wheel, and you drive a mLA to move the internal extraction plate. Everything works well for small LEGO refuse parts. I built the side of the compaction bin with slopes and tiles. After a number of panel attempts, this one seemed to be the best looking option. I very much enjoy the shape.
Since I had a little more internal room, I added a driveline to the truck. A rear differential powers a small fake inline 2 cylinder engine under the cab. To check it out, the cab tilts forward. The steering axle serves as a friction connector so the cab does not open unless you intend it to tilt. The doors open, and the bodywork was designed to mirror the Volvo FE 2011 body style. I built a small red refuse bin to show off the functions of the truck.
This may be my favorite build of the year. All the functions work perfectly, and the model looks great. I think I could add a tilting bin function, and add another mLA to give more strength to the extraction plate, but other than that I am not sure I would change anything. I will keep this one built for a while.
I participate in only some of the contests that are available in the online LEGO community. I generally participate if it meets the following criteria: Is the challenge within my competencies? Does the contest align with other responsibilities/projects to which I have already committed? Can I be competitive? Frankly, it is the last question that often stops me. The preceding two questions determine my limitations, and considering how good many other builders are it is not often I participate. With this in mind, I decided to enter the Eurobricks Technic Challenge 9 (nine already!?).
Edit 2016.02.16 : The contest has completed, and this Model came in second! See the results page here, and all the votes here. Thanks to Eurobricks for the contest.
A full gallery with Instructions can be found here.
What interested me in this contest was the constraints, and to a lesser extent the topic. the constraints stipulated that both MOCs had to fit within 10,000 cubic studs. I got out my calulators, and started playing with numbers. I was hooked. Additionally, building one MOC is hard, and building two from the same parts seemed very hard. It was something I had never done, and only a few builders can develop a good B or C model. The planning stage would be critical. Both models would have to be planned together right from the beginning. I toyed with a Combine/Tractor, and a Pipelayer/Crane, and even a Airplane/Boat. With each of these designs, I realized I would be using too much space with a long appendage, such as the Combine’s implement, or the Pipelayer’s arm. The cubic studs required something more…cube shaped. I eventually settled on a Snowblower and a Tractor. Both were a little more square and had similar components (wheels, engines, colors, chain links). I knew I would need to build both together, and multiple renditions would be needed. I was ready to start building.
Pretty early, I settled on 17x17x34 studs for the Snowblower. I challenged myself to include steering, a working blower, and a working salt spreader. I build the basics of the blower implement right away, complete with rotation coming from the truck drive. On the rear, I added an implement lift using a worm gear setup, and a quick link to the truck . Next, I worked on the chassis of the truck. I added portal axles, because I could not get the 5L wheel axles to say connected to the differential. This also helped to clear the front PTO from the steering function, which was linked directly to a HOG gear on top of the cabin. The salt spreader needed a take-off gear for the conveyor belt, and the discharge plate would be driven separately from the rear differential. The mechanics were set. I then worked on the cab. I made sure the cab, the blower, and the spreader could be easily removed by removing up to four pins for each. It’s a fun modular function that allow for other attachments.
I first made a pile of all the parts used for the truck while it was still built, and made a first draft of the tractor. Based on the parts of the Snowblower, the tractor would have four wheels, a 2 cylinder engine, and something with a whole bunch of 3×3 round, red, liftarms. I first modeled it after a John Deere 7R series, but realized this would leave me with too many left over parts. I then tried modeling it after a Claas Saddletrac. This seemed to be a better fit. I then took apart the Snowblower, making instructions as I went. I then used these parts to make the official model B. Over the course of a week, I made many revisions.
Both models worked well, as none of the feature are too complicated. I was pleased with the A model as everything functioned as it should, and it looked great. The tractor was simple, and it’s simple functions worked well. I was pleased with how it all turned out. It was great working with a limited number of parts for the B model, but I would prefer to clean up the look of the tractor a little better. This was a great little contest. I loved the restriction of the cubit studs, and I loved having to make a MOC with a defined group of parts. Now let’s see how the voting shakes out.
Two years ago I built the Spitfire MkIIa. It remains one of my more popular builds, and one of which I am still quite proud. It was not my first large plane, though when I completed it, I said it would be my last.
I learned a lot of great things from the Spitfire. Large scale building is exciting, and challenging in that you have to think about significant structural considerations, placement, and shaping before and while your build.
With this in mind, I wanted to develop what I have learned, but allow myself the ability to take a large scale aircraft to the next level. I wanted to improve the function of the control surfaces, design my own propellor, use four Power Function channels, and use the boatload of Dark Green parts that I had recently acquired. I considered a number of airplanes, including doing the FW-190 again, but I finally settled on the Typhoon. Time to get building.
After some planning, I had my scale. 1/13 was an appropriate size for me to replicate the plane and its functions, while still keeping the plane from getting too large. This scale would also allow for LEGO wheels for the landing gear, and a worker able propellor spinner design. As I learned from the Spitfire, placement of large components needed to be done early, and placed in the MOC to its exact final location. As the structure of the fuselage and wings would be stressed heavily, large components could not get in the way. Once I placed the engine block, the landing gear, the power functions, and the control surfaces, I was able to start putting together the robust structures that would support the final plane. One of the major challenges of this plane was the outset landing gear on the wings. Because they were located 42 studs apart, the wings needed to be strong. But due the the space taken for the control surfaces, and the massive 24 cylinder power pack, the wings still sag a little under load.
The control surfaces were activated with strings with studs on each end. I found this to be a better system than the axle controls for the Spitfire. It kept the controls more smooth, and reduced the amount of play in the controls. The elevator and ailerons were controlled with the joystick, and the rudder was controlled by two foot pedals in the cockpit. The remaining functions were controlled via Power Functions. An XL motor powered the massive 38 stud diameter propellor, as well at the 24 cylinder Napier Sabre engine. A M motor controlled the pitch of the propellor. Another M motor powered the landing gear, and still another adjusted the flaps. All four motor were mounted in the chin of the aircraft; I had to use that huge chin for something. The two IR receivers were mounted in under the windscreen, and the rechargeable battery was mounted behind the cockpit.
Finally, I had to make sure all the markings were accurate. Again, due the limits of dark green parts, it was not an easy task. I started with wings, and made sure to add invasion stripes, and work my way out to the tips. The roundels were a little different than the Spitfire, but were a little larger. The fuselage took a little work to make sure the panels could be easily removed, but I eventually got there. The fuselage roundel should have a yellow ring around the outside, but the strip is so small, I could not figure out a good way to do it.
The plane worked almost perfectly. The ailerons were a little sticky, but other wise everything else managed to work for an 8 hour shift at Brickworld. The plane was liked enough to be nominated for Best Air Ship. While it did not win, it was validation that the the model was a success.
LEGO takes up space. We all know this, and yet we still seem to try to cram as many working functions into a MOC as we can. Sometimes it works out well. Sometimes we have to scrap a few functions. Other times, the functions are so dense you really cannot believe you got it to work. This is the story of my wheeled feller.
The full Gallery may be found here. Instructions may be purchased for $5 USD.
I have been thinking about making a feller for about two years now. It is a project I have never seen done before, with the exception of two trackedfellers (OK, and my other one). Over this time, I have been planning, acquiring parts, and making plans, and over the last four months I have been building. Nothing I have made has been so complicated or so dense. There is no space left.
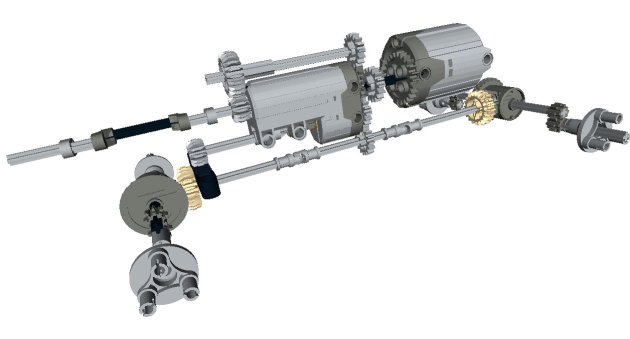
As I always do, I stared with the dimensions of the vehicle. The schematics for the CAT 573C were easily available, so I stared with the chassis. I knew space would be an issues, so the driveline had to be simple and compact. The Power Functions XL motor would be geared down 3:1 and mounted just behind the rear axle. A drive shaft would move through the steering pivot to the front axle. The rear axle would have simple pendular suspension. The steering would be completed by two linear actuators placed on either side of the pivot with a PF M motor on top. Simple enough.
From here, things got complicated quickly. The MOC would have four remaining functions. The feller saw, the grapple arms, the feller tilt, and the feller lift. Since trees are rather heavy, fellers are designed with as many of the system mechanics behind the rear axle. As such, all of the functions I would add would need to be in the rear, as the front would not have any space. I quickly learned this would not work.
Eventually, I found what would fit. The IR Receivers would make up the rear bumper, and the battery box would be directly over them, off to the left. Two PF Ms would be on the right and would drive two mini Linear Actuators. These would move two pneumatic valves. These pneumatics would move the lift function and the grapple arms function. An air tank would supply the pressure from a pneumatic pump placed on the driveline. Another PF M would be placed over the front axle to give the feller head the tilt functions (it should be noted, 7 designs, and five weeks were spent on this feature alone). The final PF M was in the feller head, and would drive the feller saw.
After packing, repacking, and packing again, all the features we set. Then all the cabling and hosing were placed. No easy task, as I was running out of space, and 25 or so hoses, and 10 cables take up a lot of room. I added some comfort features to the cable, including a (half) chair and a roll cage. And so Mr. Technic could get in, a little step. Then a lot of paneling for the rear, including some access doors on the rear, and the model was done. Here it is in action.
As you can see in the video, the MOC worked well, but some of the functions did not work as clean as I would have liked. The drive and steering were fine, with an easy drivability. There was a lot of mass in the back, so sometimes the torque from the drive motor would cause the back to tip. The saw worked well enough, and for the most part so did the tilt, but the pneumatic lift struggled. It was a little overloaded because the saw unit was too heavy. The grapple arm worked well, but for both pneumatic rams were hard to control. As always with LEGO pneumatics, they too often are off or on.
I am not a very ambitious person. Sure I made it through college and graduate school, and have managed to work well in job for a while now, but for me to do something challenging, takes a lot of convincing. It doesn’t happen often. This project was a little bigger than it should have been, and I got in over my head. This is not the first time this has happened (1, 2). The project was interesting enough for me to keep moving forward, even after six months. I present my 1:12 scale Spitfire Mk IIa. I hope you enjoy the work.
View the full gallery here, and the work in progress gallery here. Flickr set is here, and full instructions may be downloaded here.
First, the whole reason I did this project was because of the excellent Baby Twin Otter of Cpt. Postma completed two years ago. If you have not yet seen this creation, take a look at the above link. When I first saw this model, I went home a made his variable pitch propeller This was the first step to my Spitfire, though at the time I did not know it.
I chose to do the Mk IIa version Spitfire for a couple of reasons. First, the model had to have a three blade prop, because I wanted to use Cpt. Postma’s design. Spitfires stopped using a three blade prop somewhere in the middle of the MkV series. Second, I wanted to model a eight gun variant, rather than the cannon variant because I think it has a cleaner look, and I love the red and yellow leading edges on the eight gun variants. Finally, while it would have been great to do a early model Spitfire with the dark tan camouflage adding both the dark green and dark tan would have been too expensive, and even more ambitious. I found a number of pictures of a certain MkIIa with all the features I wanted. I chose a Spitfire flown by Lt. Tomas Vybiral, who was a Czech pilot with the French Air Force. The plane was Spitfire P8081 when he flew for the British in Squadron No. 312. It had simple markings for me to recreate, a camouflage pattern I would be able to do (read afford), and I found some good documents to help my modeling.
Next came the internal planning. The Spitfire would have working ailerons flaps, rudder, and elevators (with correlating pilot controls), prop, prop pitch, V-12 engine, and retracting landing gear, all within the 1:12 scale. Once I had the dimensions calculated, I started placing things in a simple “placeholder” model on my floor. I constructed the engine, the propeller spinner, pedal/joystick assembly and placed them in the placeholder. Then I made the placeholder 3D.
It took two months to get the rest of the internals all set. The required moving various parts of the 3D placeholder, and adding additional parts. The joystick is connected through various liftarms to the rear elevator, and by axles to the ailerons The pedals connected though a shaft to the rear rudder. You can see the gears on the rudder. The flaps have a simple lever in bottom left side of the cockpit.
The rest of the functions are controlled via Power Functions. The small 8878 battery box is placed behind the cockpit, as is the IR receiver. A PF M is housed under the V-12 and drives four mini linear actuators for the landing gear. It is strong and simple, and works well. It does not have the correct Spitfire landing gear geometry, but if someone can figure out a way to do it at this scale…well, I can’t figure it out. A second PF M is used to power the propeller It is placed directly behind the V-12. Finally, a third PF M is placed behind the V-12, and works through a system of gears to power two mini linear actuators to move the pitch of the prop. It’s messy inside, but it has everything I wanted.
After the internals, I had no idea how hard the rest of the Spitfire would be. LEGO, you need to make more parts in Dark Green. I know how selfish that sounds, but it would have been more helpful. Thank to some newer sets, like the 10226 Sopwith Camel, and the 21016 Sungnyemun, it made it much more possible, but still limited me in many places. I spent the next four months acquiring parts, and placing small plates over the rest of the plane. With some help on the roundels from Dieterr89, it eventually came together. The bodywork took a long time. Too long. And the lack of some parts in Dark Green forced me to make some concessions. The canopy frame should be all Dark Green, but it was not going to happen with what is available. The camouflage is not as clean as I would have liked, and there are some abrupt steps where some plate limitations made the transition for one part to another not smooth enough, such as on the rear fuselage. Also, try as I might, I could not get the leading edge of the wing to be perfect. The dihedral did not help either, nor did the yellow leading edge. Also, the gaps between the control surfaces and the fixed part of the wing and stabilizer was more than I would have liked. But this has happened before.
I am please with how it turned out, but there are some parts that I wish would be better. I never seem to remember this when I start a project in this scale, but free moving functions just do not operate well as you hope when you keep adding parts. The control surfaces work, but they could be smoother and lighter. The powered functions worked flawlessly. I was very please with the way the markings turned out. They are not as flush with the plane as painting would cause you to believe, but they make the Spitfire clearly identifiable.
My father would always tell me “never say never,” but it may be a long time before I do another large plane. But I guess I said that back in 2008.
Building with Lego is a continuous formation of compromise. While my ideal of what my Mini Feller would include was significant, what I could actually accomplish was a compromise of space, function, realism, and frankly the amount of frustration I was willing to tolerate. So while the final result is a watered down version of what I would have liked, it was the result of me compromising amidst the situation.
I wanted to make a small model go with my Mini Skidder. The MOC had to be the same scale, have a decent level of fuctions, and work with my Skidder. A feller seemed like a good option. As I looked at what function this MOC would have, I ambitiously stated it must have a working blade, working steering, working grapper, and a working tilt function. All these functions would be controllable on the back or on top of the cab.
The steering was simple enough. I added a small turntable at the bottom of the chassis to give the frame some support. The HOG steering axle would come out at the top of the cab, and join the front and the rear with a small link arm. Simple enough. Likewise, I added a differential in the rear part of the chassis, geared up the rotation, sent it though a couple of universal joints to the front of the Feller, connected it through a pair of 12z bevel gears, and attached a saw blade. Again, simple enough I had steering and a working blade.
It got complicated as I tried to add the arm features. The lifting of the arm would be done with a 8z gear with a worm gear. Because there was a driveshaft to the front blade, the 8z gear needed to be placed on the axis of the arm, but out of the way of the driveshaft. The required a 1 stud offset that also needed to be directed back through the steering axis to the rear of the Feller. I used a CV joint to allow the axle to slip as the feller would steer.
The tilt feature would require a parallel control that would allow the elevation happen while keeping the feller blade parallel to the ground. This would require another 8z worm gear connection at the lower rear pivot point of the arms. I was running out of space. Of the 7 studs to work with, one was used for the universal joint, one was used for the lifting gear, one for the mounting liftarm, and one for the lifting arm. I could not add another worm gear system, while being able to actually lift the feller blade. Additionally, adding a link for the gathering arms would also have to work through this pivot point if I wanted to isolate the movement from the lifting and tilting feature. I had to give. A compromise was necessary. I felt the stability of the feller blade had to be paramount, so I added another support arm. I also felt gathering arms must remain as they are essential to a feller. Sorry, but the tilt feature got the ax. It was the correct decision, but it still tasted a little sour.
It was a great little MOC, and I had a good time creating it. I hope you enjoy building your own. The full gallery can be viewed here and the instructions can be viewed here.
Every once and a while I get picked up by another LEGO blog. I am honored when it happens as it show others value my work. However, it seems to happen when I lease expect it, and in creations I find fun, rather than significant. Thank you none the less.
This monster dune buggy was unearthed by the Elves on MOCpages. K Wigboldy has included steering, all round independent suspension and, best of all, a huge six cylinder engine hanging out the back.
It has been six years since I bought my F1 Wheels and Tires. I bought four, and I paid a lot for them. To date, I have used them once in my Red Sedan; and only two of the four that I own. For some reason, I decided I needed to use them again and I wanted to do a small little project. I was recently reminded about a childhood video game P.O.D. racing, and thought the car I was designing would fit right into the game.
The car is a simple design; a drive motor, a steering motor, a battery box, and a receiver. I knew I was going to design a three wheel car. I wanted to have the rear wheel driven by a PF XL, and a single PF M with a simple return to center system for the steering. After a couple of designs, I decided to place the PF XL motor in the hub of the single rear wheel. I tried a couple of designs to gear the motor up for a little more speed, all with various locations in the car. Nothing worked as well as I wanted. The speed was sufficent, and placing the motor in the hub allowed for a super short wheelbase.
Because the PF XL was place in the rear, I had a lot of space for the rest of the Power Functions equipment. I placed the battery box directly in front of the rear wheel right at the bottom of the car. The front steering axle was place next in front of the battery box. The car had a short wheelbase of only 18 studs. On top of the battery box, I placed the PF IR reciever and the PF M motor which was for the steering. The steering motor passed an axle straight through a Spring Loaded Connector to move a 3L liftarm which connected to the steering rack with a 6L steering link.
I added a simple body using the orange panels from 8110. Keeping with to story of P.O.D. I wanted to keep an agressive stance and look to the car.
The car ran well, and was plenty quick. The steering was sharp and the car was well planted on the road. I had a good time with the design. Now I need to come up with another use for my F1 wheels.
The full gallery may be found here, and instructions here.