Mack Magma
March 28, 2017 5 Comments
I consider myself a LEGO purist. I do not cut parts, paint them, and I do very little with custom stickers. But I confess, I’m bending my purist tendencies as of late with all the great custom tire options available. After getting these RC4WD tires, it was time to build another trial truck.
The full gallery may be found on Flickr.

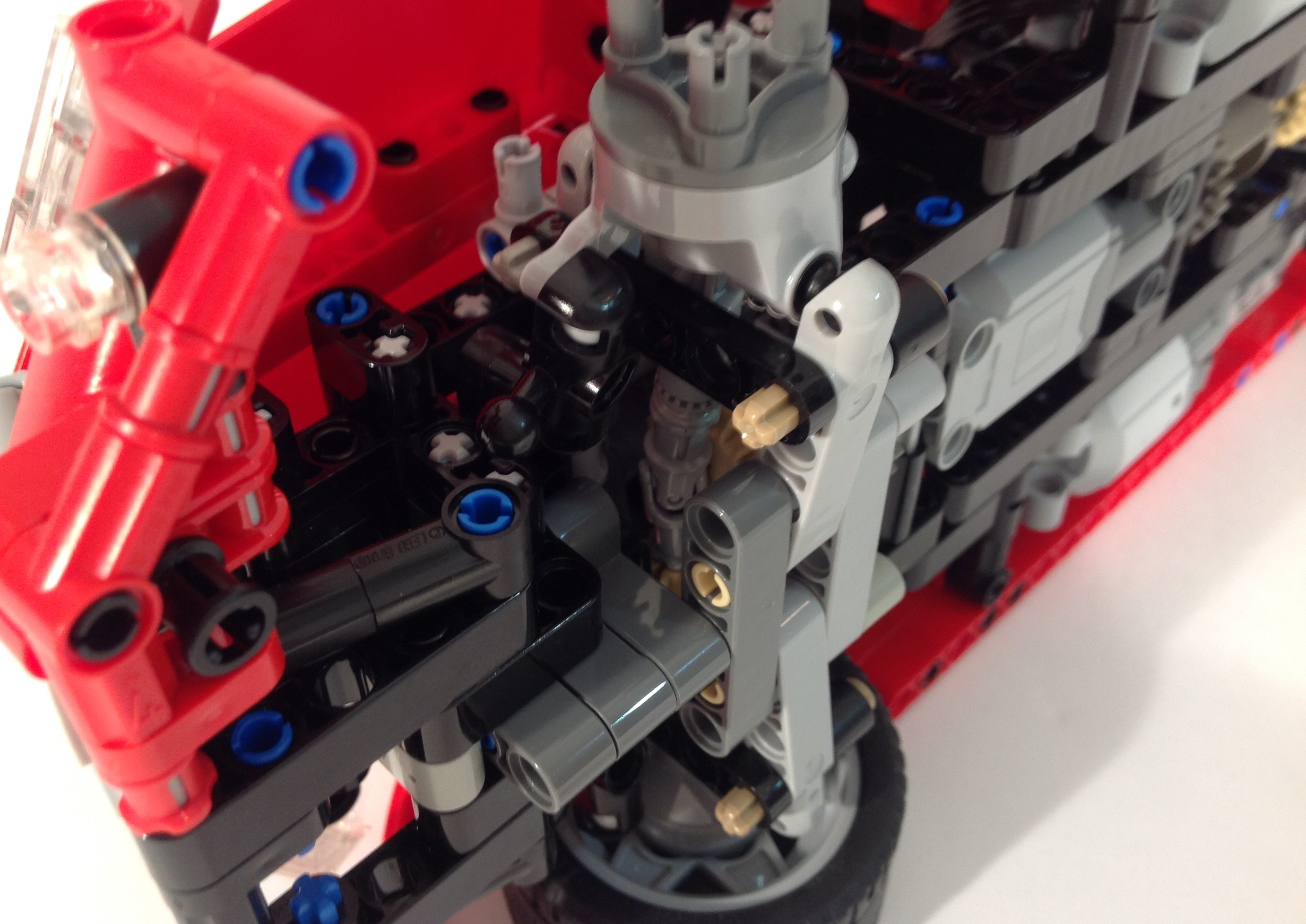
When I build a trial truck, start with three questions: What functions will it have, how many Power Functions receivers will that require, and how many battery boxes will be needed in what placement. Using these decisions I draw up a basic sketch of Power Functions part placement, and I get to work. This truck would have steering, a 2x PF L motor drive, and a two speed transmission. As with other trucks I make, I started with the axles first. The axles were simple as they required no additional functions. Both front and rear have a knob gear in then center, then a 12t to 20t reduction, and a final 8t to 24t reduction in a portal axle setup. The front as a simple steering setup, and the steering universal joints between the first and second gear reduction.

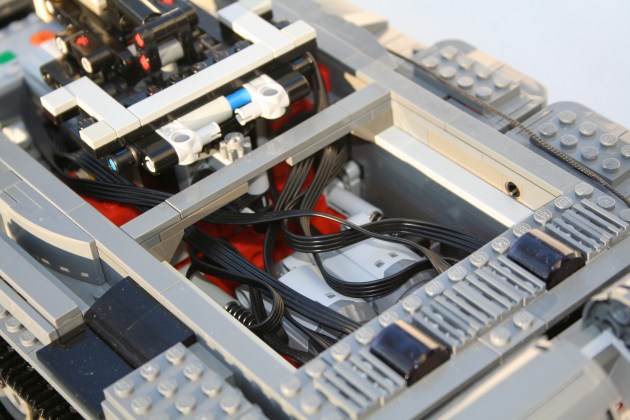
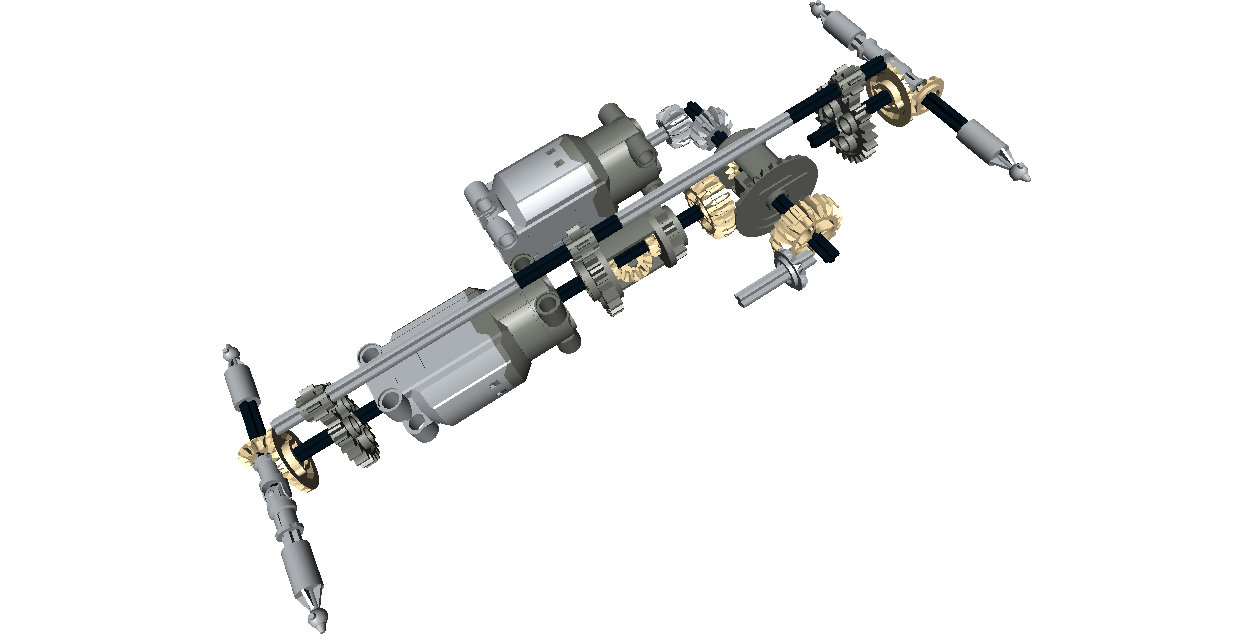
Both axles are strung together with a frame that houses the suspension and electronics. Both axles have pendular suspension, and are linked together with liftarms front to rear. It is a system that is simple, and incredibly effective. A PF M motor is placed in the front to power the steering, and another M motor sits beside it to power the transmission. Two PF IR receivers and two rechargeable battery boxes are placed with one on each side of the chassis. Both PF L motors are mounted side by side in sliding housing in the rear of the chassis. Each motor drives a set of 12t and 16t gear. These separate axles combine to either a 20t or 24t center mounted gear. When both engines are connected 12t to 24t gear, an overall 10:1 ratio is achieved. When both engines are connected to the 16t to 20t gear, an overall 1:6.25 ratio is achieved. With the power of the L motors, this gives a good low ration, and an appropriate high ratio.

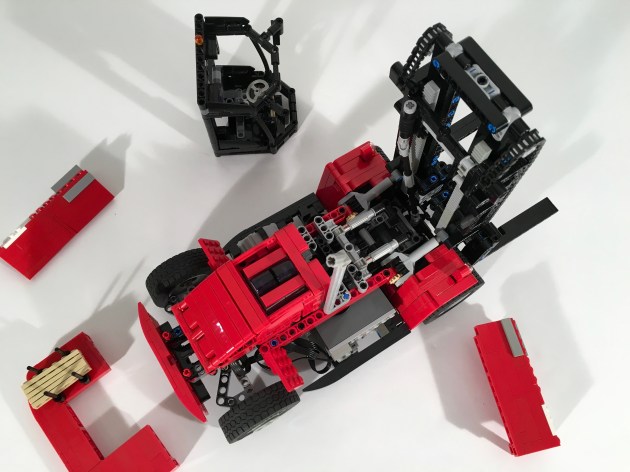
As this was a quicker build, I did not spend too much time on the bodywork. A simple flat bed was installed, and the cab is sparse. I selected a simple America style cab from this design idea to build in blue. The grille is big and square, and the rest of the cab generally follows the idea. Both the cab and the bed can be simple removed.

The truck has plenty of power, and the transmission worked without error. The steering was easily controllable. The larger tires gripped very well, as they are soft with big knobs. They were a little taller than LEGO’s tires, and combined with the softer sidewalls, made the truck a little less secure in its footing. But the truck did not roll over easily, and the soft tires made it grip the ground well. I will be using these tires again.
Until the next MOC, happy building.