Unimog U90
January 14, 2017 1 Comment
About 3 months ago I purchased a set of four Fischertechnik tires from ebricks.ru. After seeing a review of them by RM8, I reached out to him, and he mailed me a set. After a little time, I finally have something to show with them.

After playing with a number of ideas, I decided to do another Unimog. It’s easy to motivate myself to build a vehicle I love. This time, I wanted to do the unloved U90 (418) version. It was not a terribly successful version, as many find the hood…not one of the best. But few people have built this version, so I was up for it. I put to to a vote on Eurobricks, and the decision was to build it in green. Off I went.
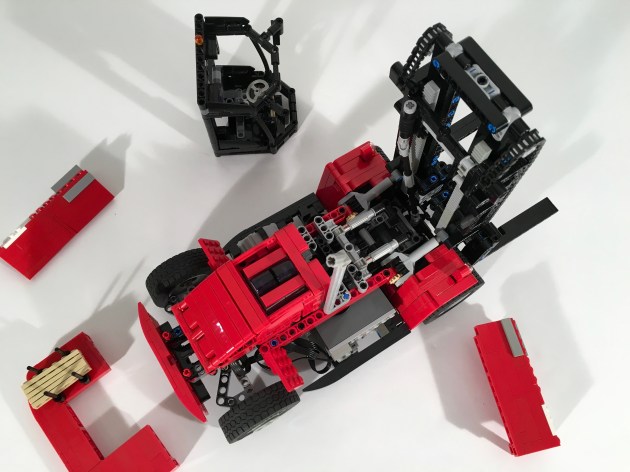
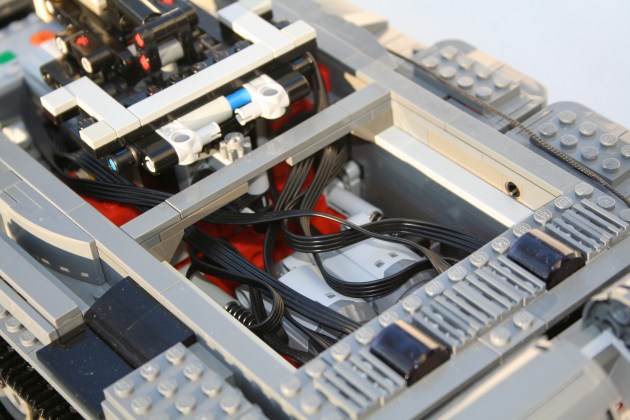
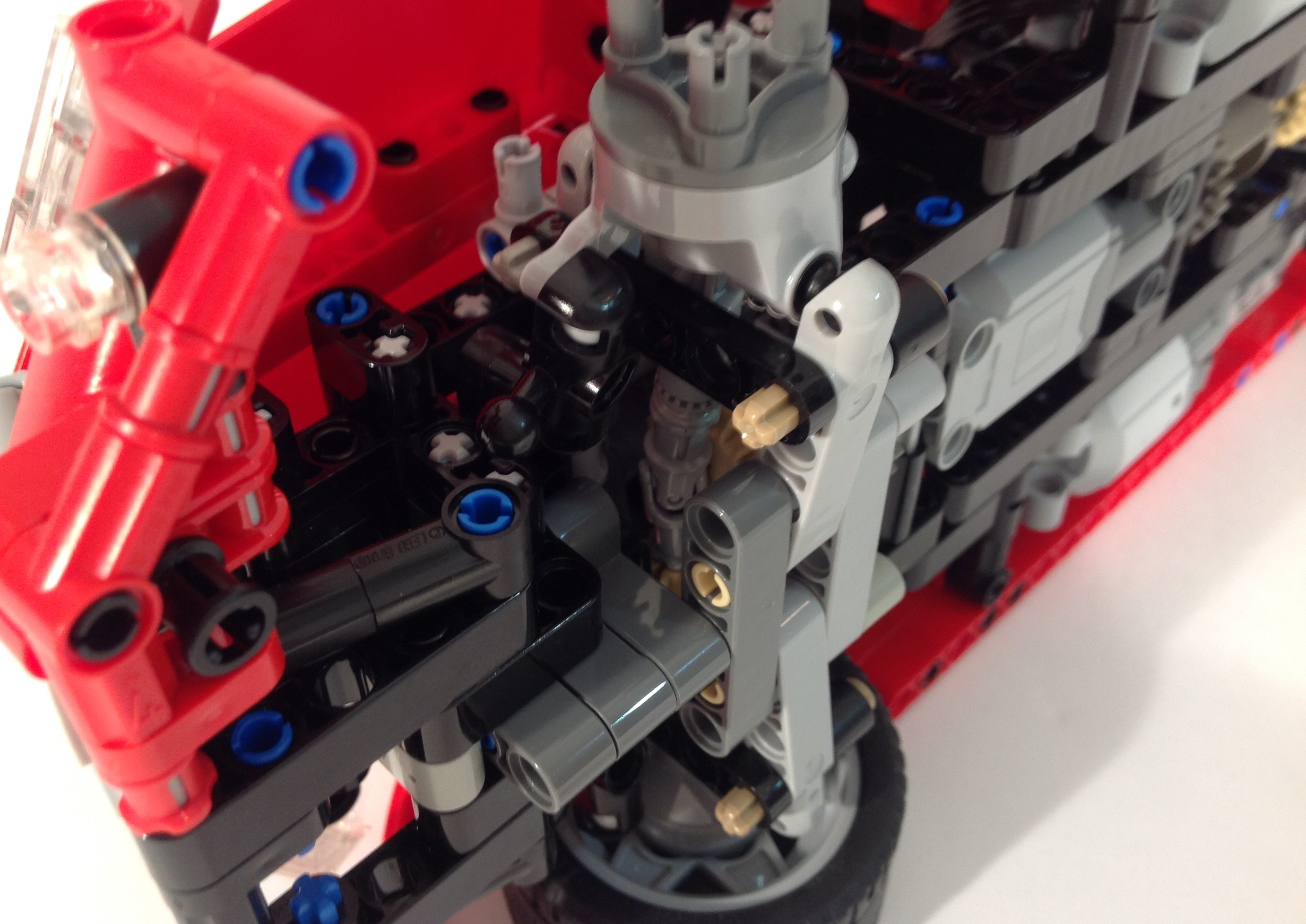
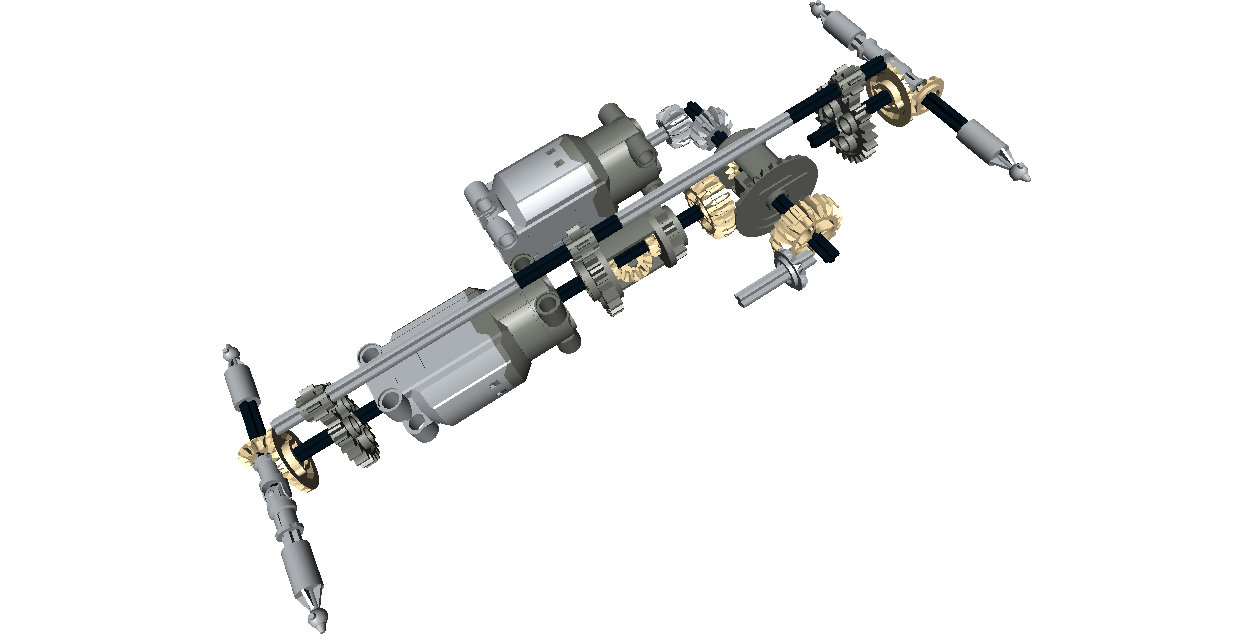
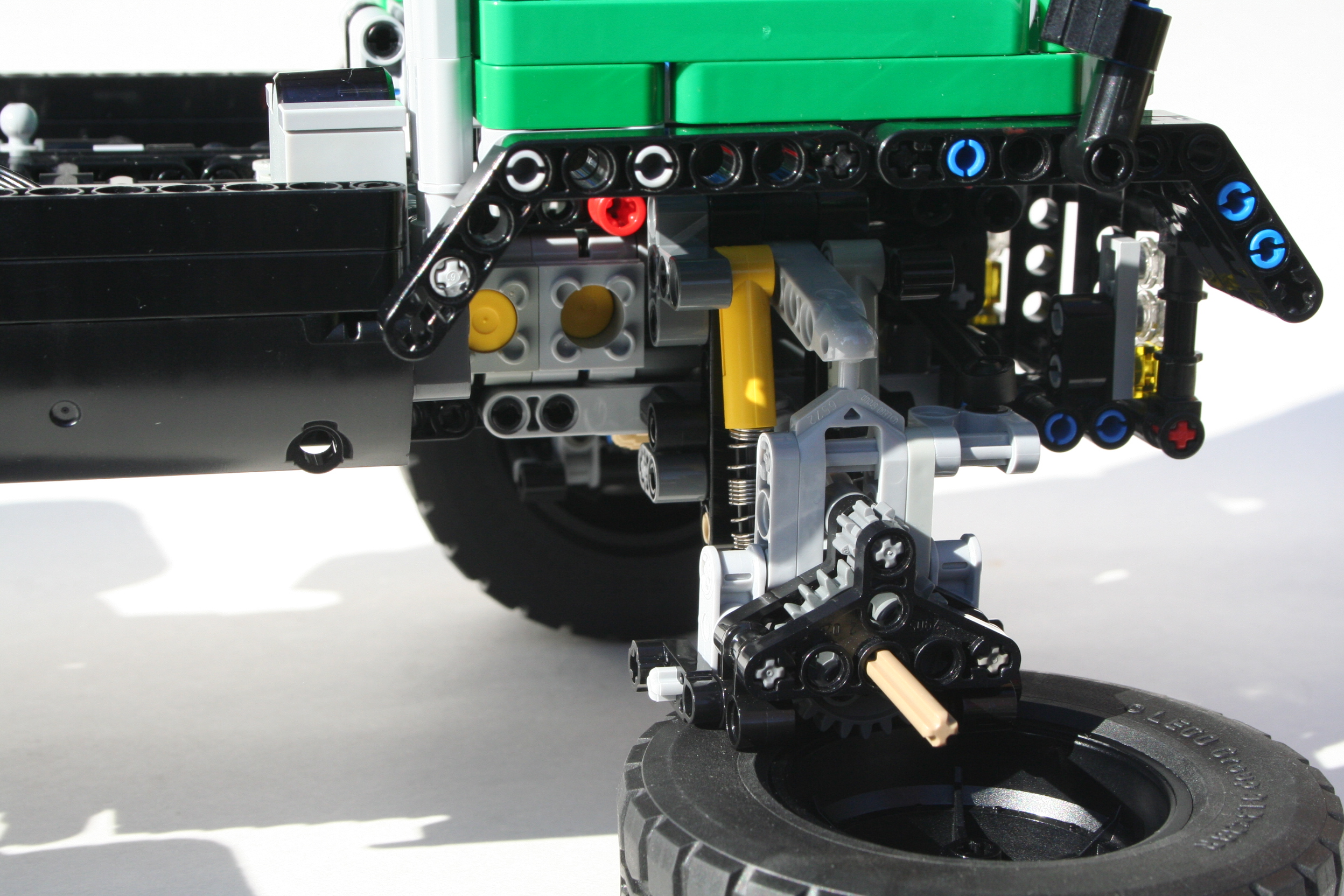
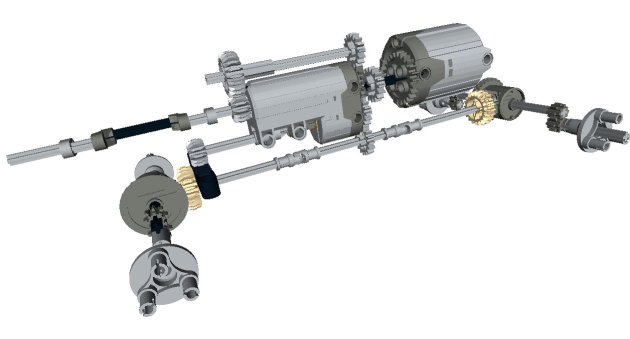
The scale required a 27 stud wheelbase and a 19 stud width. I built the front and rear axles and tied them together. Through a couple of edits, I finally added the suspension and figured out how to get portal axles into the truck. The Power Functions XL motor was mounted just over and in front of the rear axle driving power to all four wheels. The Servo motor was placed directly ahead of the XL for the front axle steering. I added a four cylinder fake engine over the front axle. The rechargeable battery box was placed over the rear axle.
The suspension is a live axle setup, with four hard shock absorbers at each corner. Each wheel has about 2 studs of travel. Not much for a Unimog, but enough for a 418. At this point I started a draft of the cab, and a draft of the bed. At this point the truck had an identity crisis. Move forward with green or find another option.

Building LEGO Technic with green is not the easiest. The color lacks 1×5 and 1×11 beams. Both of the these parts would be needed for the bed and the cab. I could make some things work for the 1×11 in the hood, but there was no other option (read, inexpensive option) for the 1x5s needed for the bed. I toyed with other colors for the bodywork; orange, white, blue, yellow. None of them had the right pop I was looking for. Other than the orange, but, as other have said, orange has been done too many times. Then it dawned on me, “why not use plates?” I had my solution. With one bricklink order, I was done.
The truck drives well, and is easily controllable. The front portal axle can use a little strengthening, so serious trial abilities are lacking with this truck. Both the bed and the cab can be easily removed. I ran out of space for a ram to elevate the bed, but it can tilt three ways. I was pleased with how the truck turned out. It looks great. The driveline coule use some improvements, so I will make those improvements on the next truck.
-

- Unimog U90