3 Speed Sequential Transmission with Changeover
December 1, 2012 2 Comments
A couple of years ago, I was building a MAN LE with the sole intention of creating a new gearbox. The tried and true changeover with clutch gears is a great system, and works well in a lot of situations, but I had been disappointed with how it functioned in trucks. Particularly with the neutral. I could not have my trucks roll backward. There had to be a better system. There were four things I wanted to address:
First, each gear-change had to move seamlessly from one gear to the next. No neutral.
Second, it had to be easily controllable with power functions.
Third, it had to be sequential. No first to third gear shifts.
Fourth, it had to work. Every time. With no slipping.
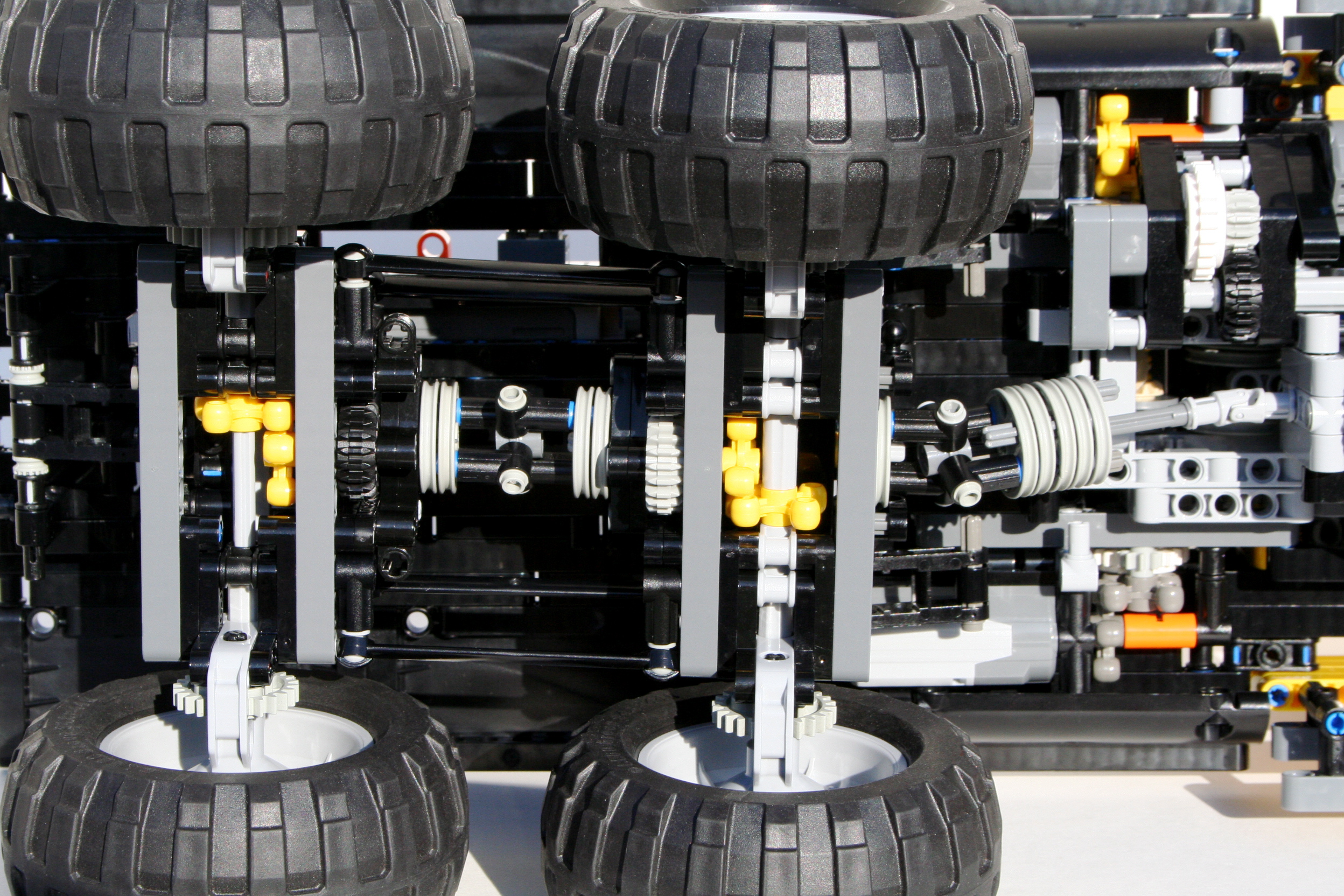
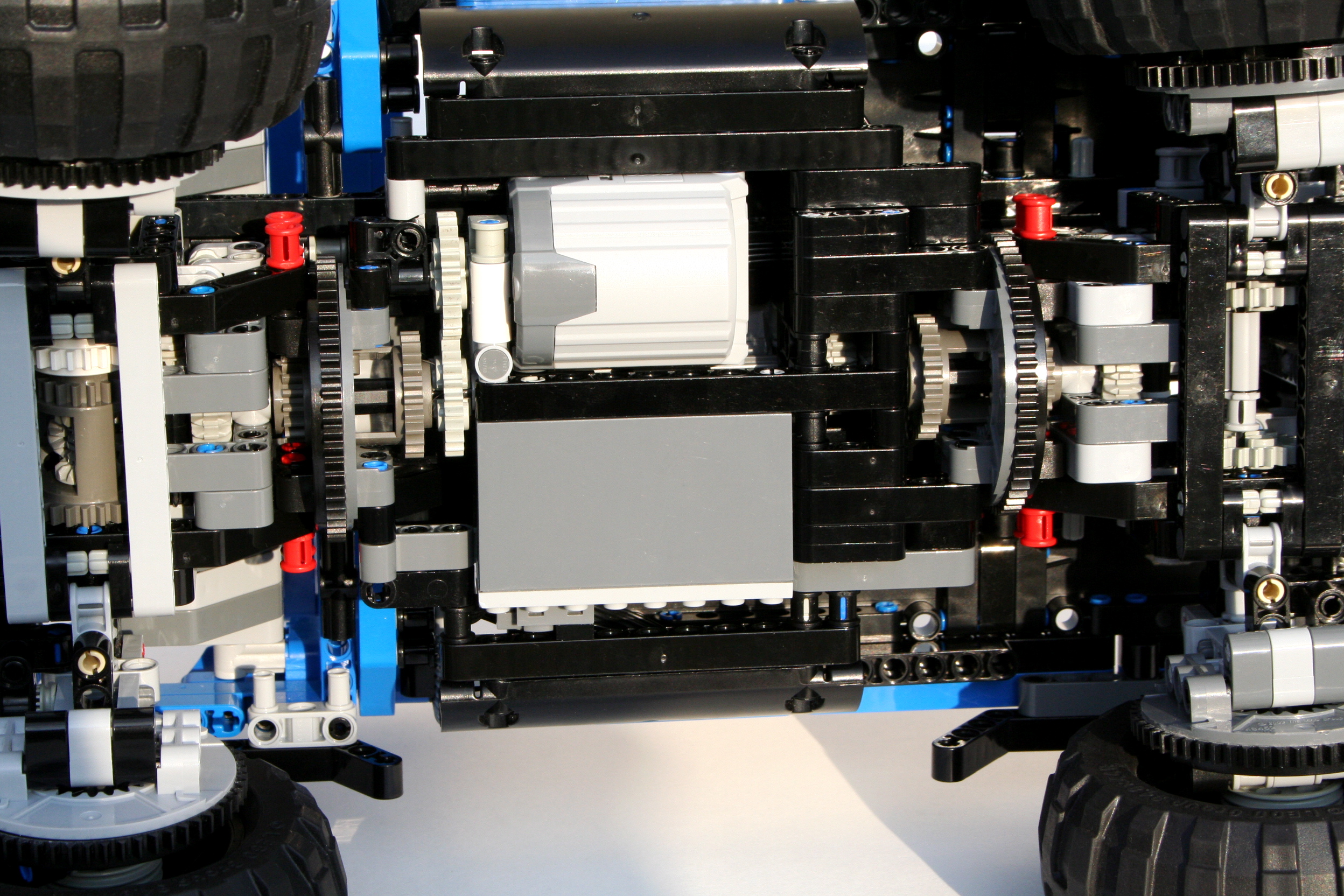
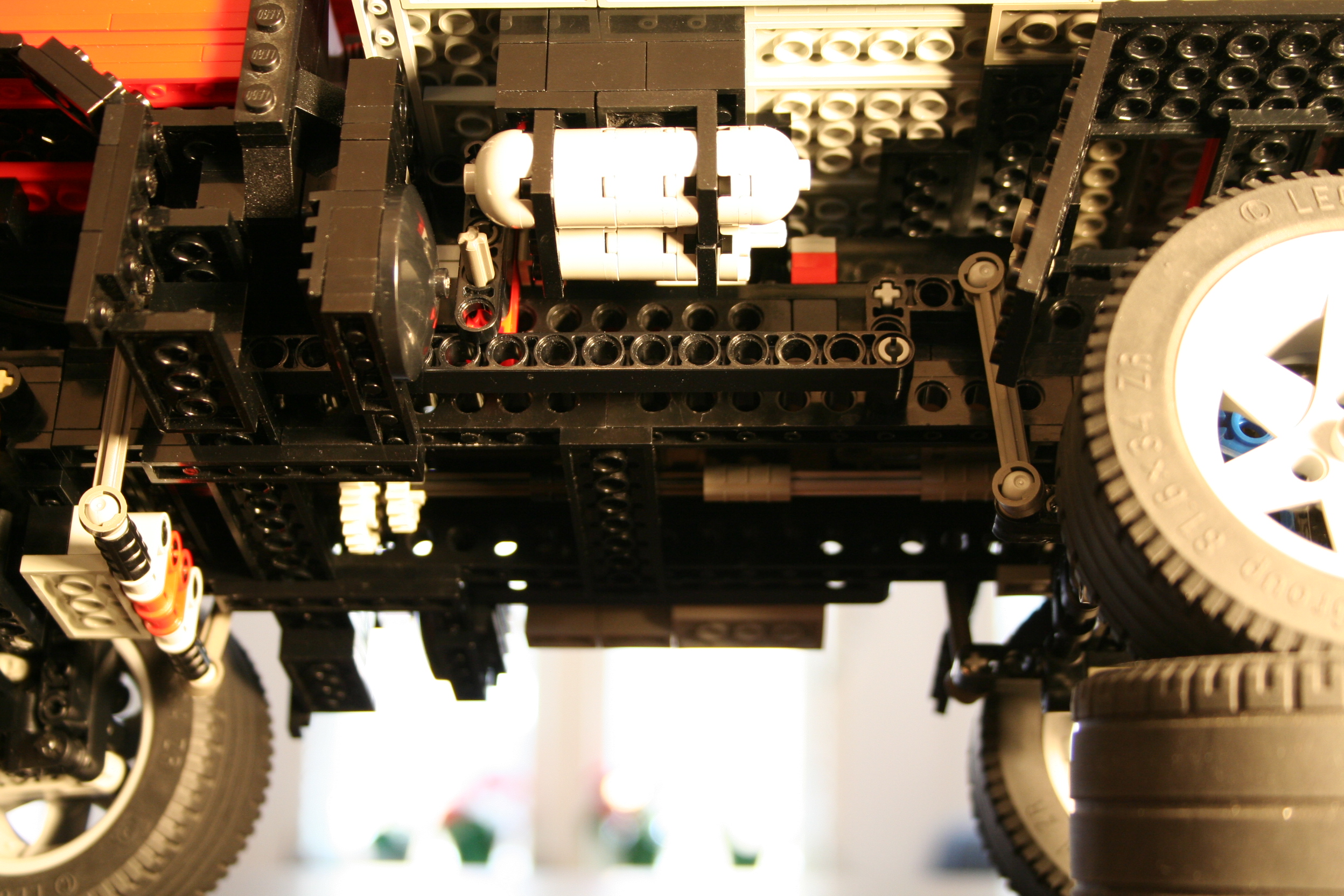
The first goal was easy to address. I came up with a simple sequential gear box, that would move between three ratios all spaced one stud apart. In order to get to gear three, you had to go through gear two. To make sure the gears would slip into sync every time, I chose the double bevel gears as the change over gears. You can see in the video how they slide into gears pretty easily.
The second goal was the most difficult. I have stuggeled with finding a solution that would allow a motor to move from one great to the next without “overshifting.” To many designs require you to stop the motor so the gears are perfectly meshed. After looking at a design from ATRX, I had an idea. I needed to use the pulley wheels to move the gearbox in three steps. So, how could I get the pulley wheels to stop at three spots around a half a rotation. The pulley wheels would be connected via a 24z gear to a differential. Each side would have M motor, with stops for half a rotation. One motor would move a half a rotation, transmit the rotation through the differential which would turn it into a quarter rotation, moving the pulley wheels a quarter rotation as well. One motor would shift from gear 1 to gear 2, then the other motor would shift from gear 2 to gear 3. It was sequential, and it would only allow you to shift to the adjacent gear.
Finally, it worked. Every time. No missed shifts. I have made a couple of modifications to the gearing and structure to make it a little more compact and with better ratios, but if your looking for a new gear box to use for your next MOC, this might be the ticket.
See the full gallery here.
Used in my Freightliner M2, MAN LE, and ZIL 132.
-

- Changeover
-

- Changeover Top
-

- ZIL Changeover














































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}