Silly Fat Penguin
July 31, 2014 2 Comments
Sometime procrastination breeds a good outcome. Sometimes. This is the result of waiting too long to come up with an idea for a contest.
The full gallery with Instructions can be found here.
A while ago Eurobricks posted a contest. While I was focusing on Brickworld, a new job, and other life events, I decided I should sit this one out. Then things died down. On July 20. It was a little late to produce something excellent. I thought it would be fun to do something other than a truck, plane, or tractor. I saw a little toy penguin on a colleague’s desk, and I thought,that’s it. That would be fun.
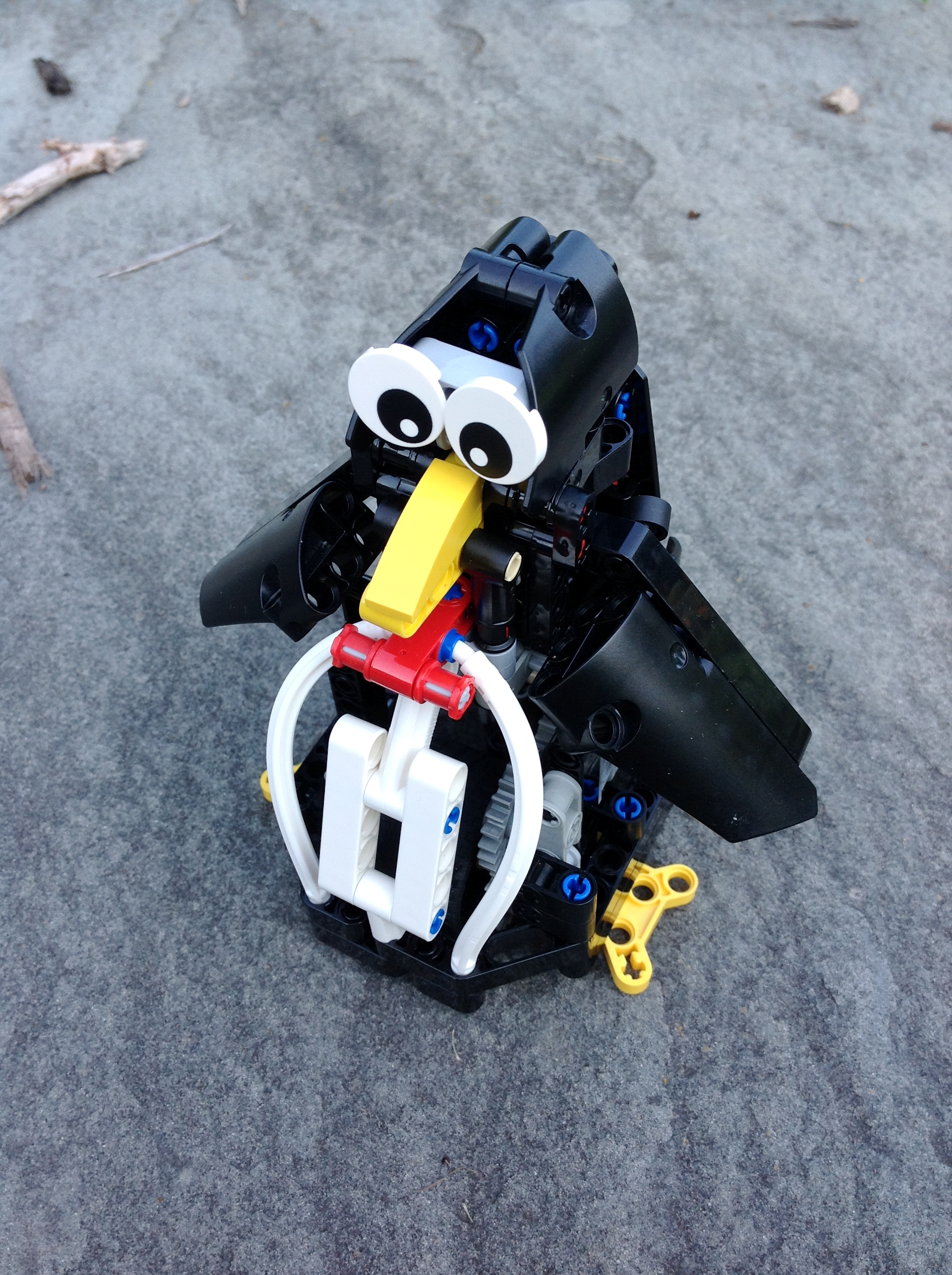
The penguin has a wheel on the bottom which runs three gears. The final gear drives a shaft that connects to the wings and the beak, making them move as the penguin wobbled along. Behind the main wheel, there is a little swivel wheel so the penguin can be nimble. I added some feet, and worked a little while on the belly. I added some fun eyes, and made sure to give the penguin a cute little bow tie. All done. All for 192 parts.
I wish I would have added a wind up motor, or gave the penguin the ability to walk by itself, but I ran out of parts and time. After filming (which is not my best work), I realized the flapping could have been a little quicker. But it was a fun little project, and my first animal creation, so that’s something. I hope you enjoy, and if you can vote, give one for me.
Happy building.











