Like so many other people, I am have a nostalgic pull to LEGO sets that were released during my childhood. I, however, make the sometimes poor decision to try and update them using newer parts and building techniques. Set 8062 from 1994 was a unique little set in that it came with instructions for multiple builds and a carrying case. I never had the set, but the helicopter and grabber truck always caught my attention.
As I try to add features to an updated set, I used the main rotor design I have used before. This simple design allows for collective movement of three rotor blades. It’s a simple design, but was a little tricker for two rotors while trying to keep the cabin free of interruptions. A HOG is placed on the left of the helicopter to spin the blades.
Like the original, a rear ramp is controlled by the HOG of the right of the helicopter. I also added a landing gear that retracts, which is controlled on the left. The front wheel is on a caster, and the rear wheels are fixed. I used many of the panel parts that have been released since 1994 for the body work, and kept the black and yellow livery.
This was simple and relatively quick build, but in the end, it seemed to be missing the look of the original. I think much of it comes down to the shape of the nose. To get the front rotor to fit with the rear rotor, I had to push it forward in such a way that the front windscreen needed to be a little more steep than 8062 was. But all the functions worked well which is always gratifying. I hope you enjoy.
In 1986, LEGO came out with one of my favorite little sets; set 8640. It is still one of my favorites, and instead of buying a 30ish year old set, I decided to update it.
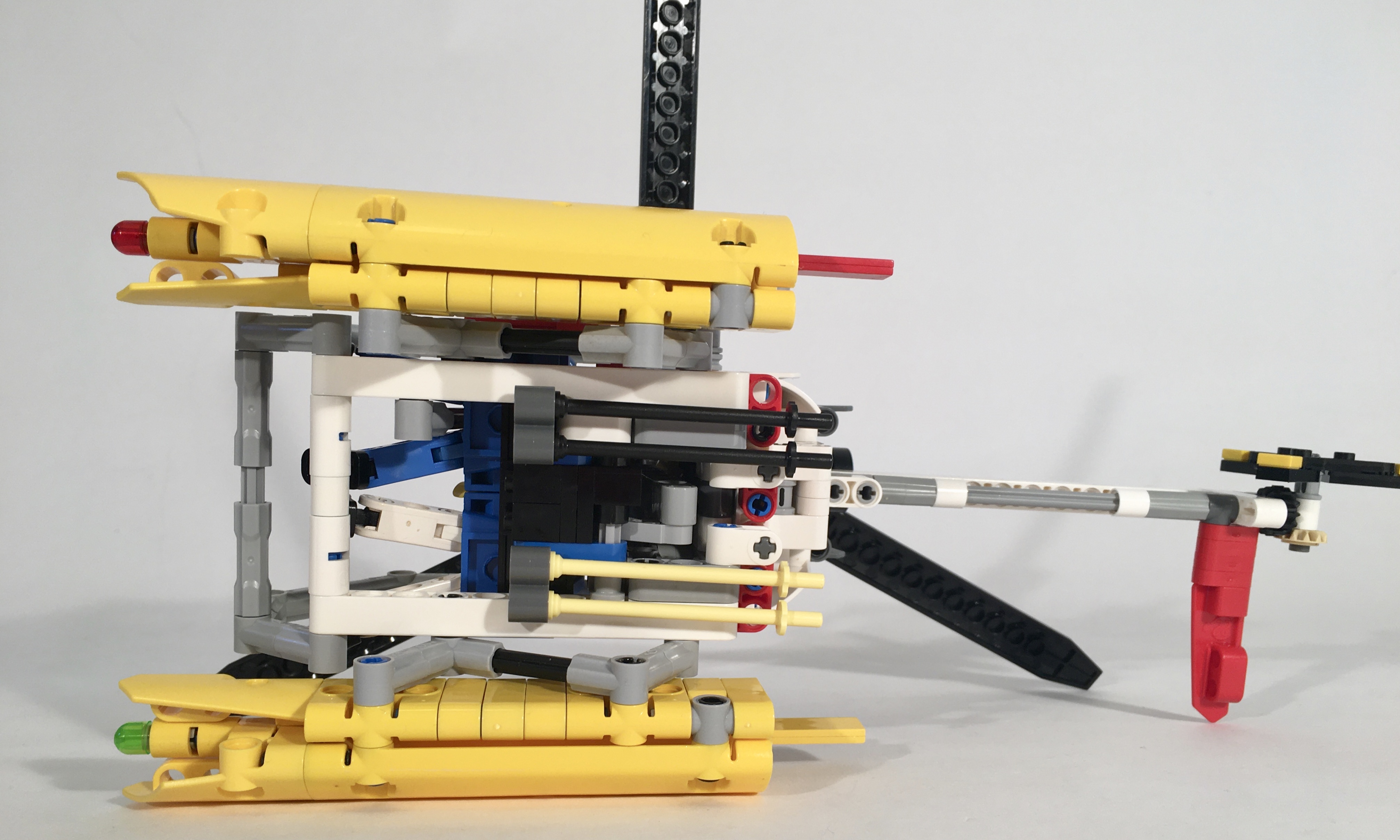
The build stared with a little variable pitch rotor design that I used previously in my executive helicopter, but since I was never really happy with this design, I kept it close on the shelf. After playing around with some panels, I found a shape that looked like the pontoons for the 8640 helicopter, and I was off.
Once the pontoons were set, the scale was clear, and I started placing some of the hard points for the mechanics. I wanted to have space for two technic figures, so the helicopter is a little wider than 8640, but otherwise the same size (length and height). The rotors and HOG crank are connected using a couple of bevel gears, and the swashplate is connected behind the two seats to a collective lever on the left of the helicopter. The swashplate moves up and down about one stud, which is enough.
Space for a pair of skis and poles
I tried to keep the design language close to 8640, so I kept the main white and yellow, with red and light blueish grey highlights. I wanted to have a cleaner mount for both the skis and poles for both Technic figures, but the solution I came up with works fine. The tail is a little different to match the studies build, and I added a horizontal stabilizer.
Everything worked well on this little helicopter, and I was pleased with how well it harkened back to 1986. I hope you enjoy.
After my last helicopter, I wanted to build one that was more basic. This one would simple, small, colorful, and would make use of the excellent blades from set 9396. I wanted to do something like the Sea King, but with a Fenestron tail. I used a HH-52 as a basis for the scale. I built a mock-up of the scale, and started making the gearbox for the helicopter. The main rotor could be operated from a gear on the left of the aircraft. Two changeovers located next to the landing gear pods could be engaged to drive the land gear (up or down, on left) and the winch (up or down, on right). The main rotor was connected to the Fenstron fan at the rear. Both the landing gear and the winch are driven by worm gears, so they would stay locked when the changeovers were in neutral.
The gearbox is mounted in the bottom of the helicopter directly under the rotor. The landing gear mechanism moves forward with the pilot and co-pilot seats directly on top (I love those new panels). The winch gear moves aft, and drives a simple string spool. The compact driveline keeps enough space for a full cabin. There is enough room to add a battery box, and a M motor to power the rotor.
The body work came together quickly with the exception of the rear doors. I wanted to add two sliding doors with windows, and based on the color scheme of the helicopter, they had a to be white. After six drafts, I finally came up with a solution that was doable. They are not perfect, but all the other designs had windows that were comically small, or too low in on the body. Unfortunate, the design calls for six white rare parts. The rest of the bodywork turned out well. The nose, while a little clunky, looked how I wanted. The top area looked good with the three engine exhausts, and the six bladed rotor, while overdone, fit perfectly. Oh, and with clever pin placement, you can fold the rotor back towards the tail. The tail looked sharp with the ducted fan. The vertical stabilizer looked empty, but that’s a problem for all LEGO Technic aircraft with the exception of 42040 (maybe).
The helicopter worked great, though a clutch for the gearbox would have been nice. I was pleased with the bodywork of the helicopter, and the colors worked well; maybe grey and orange would be great on a rebuild. I would have lived to have a cleaner design for the wheel pods, but it worked well enough. It was a good swooshable design, as I found playing with the helicopter extensively. Now I need to make a scale Coast Guard ship on which the helicopter can land. Maybe next year.
One of my first memories of a helicopter was watching a Phoenix Police MD520 land in Roadrunner Park, a block away from my house. The high pitch whine of the main prop was incredible, but another sound was missing. I gathered all my seven year old courage, and asked the pilot, “where is the tail rotor.” I got a lesson in aerodynamics that day, and to this day I can still identify an MD520 by sound. It still remains my favorite helicopter, so I figured it was high time for me to honor this aircraft in LEGO.
Full gallery can be found here. Instructions may be found here.
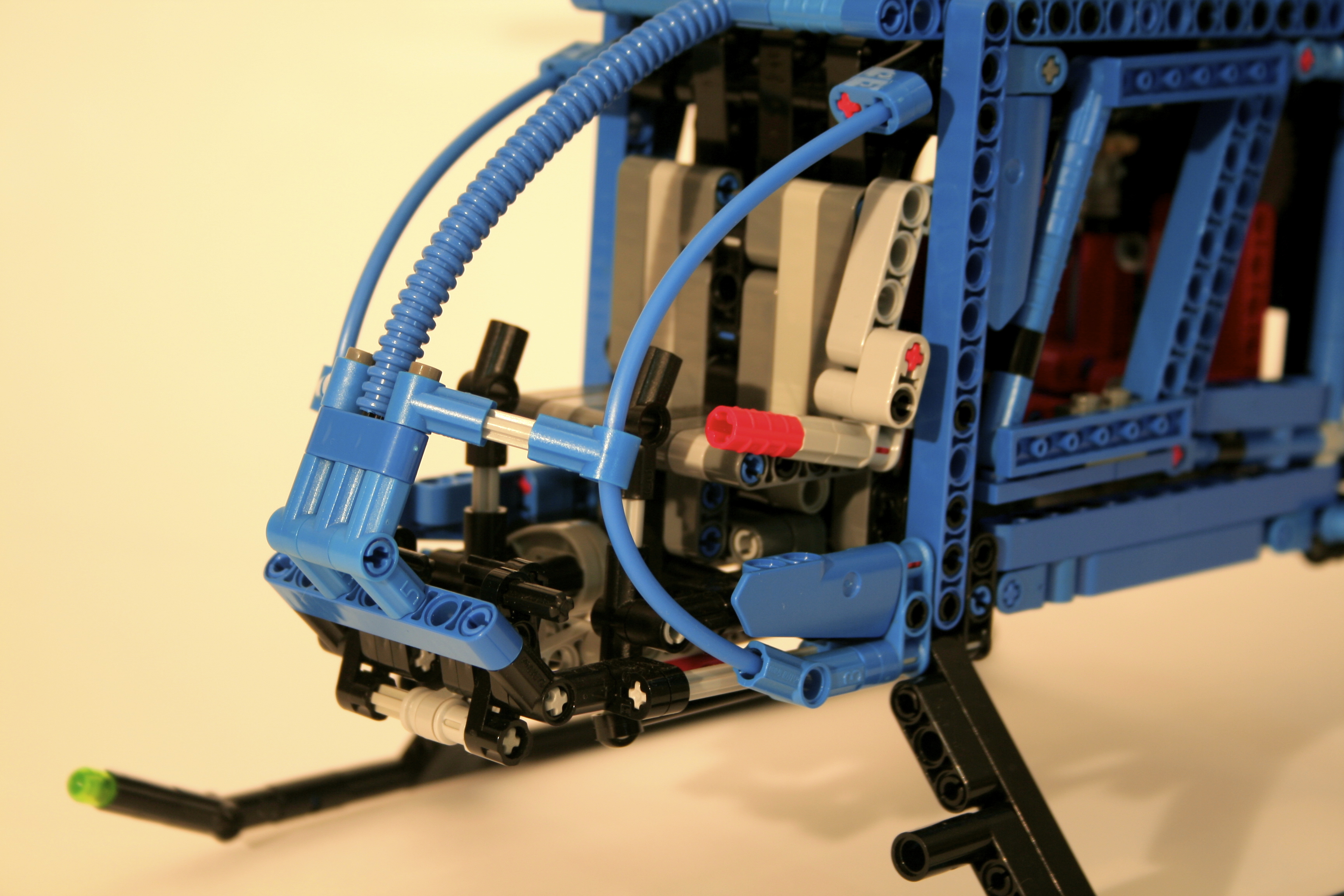
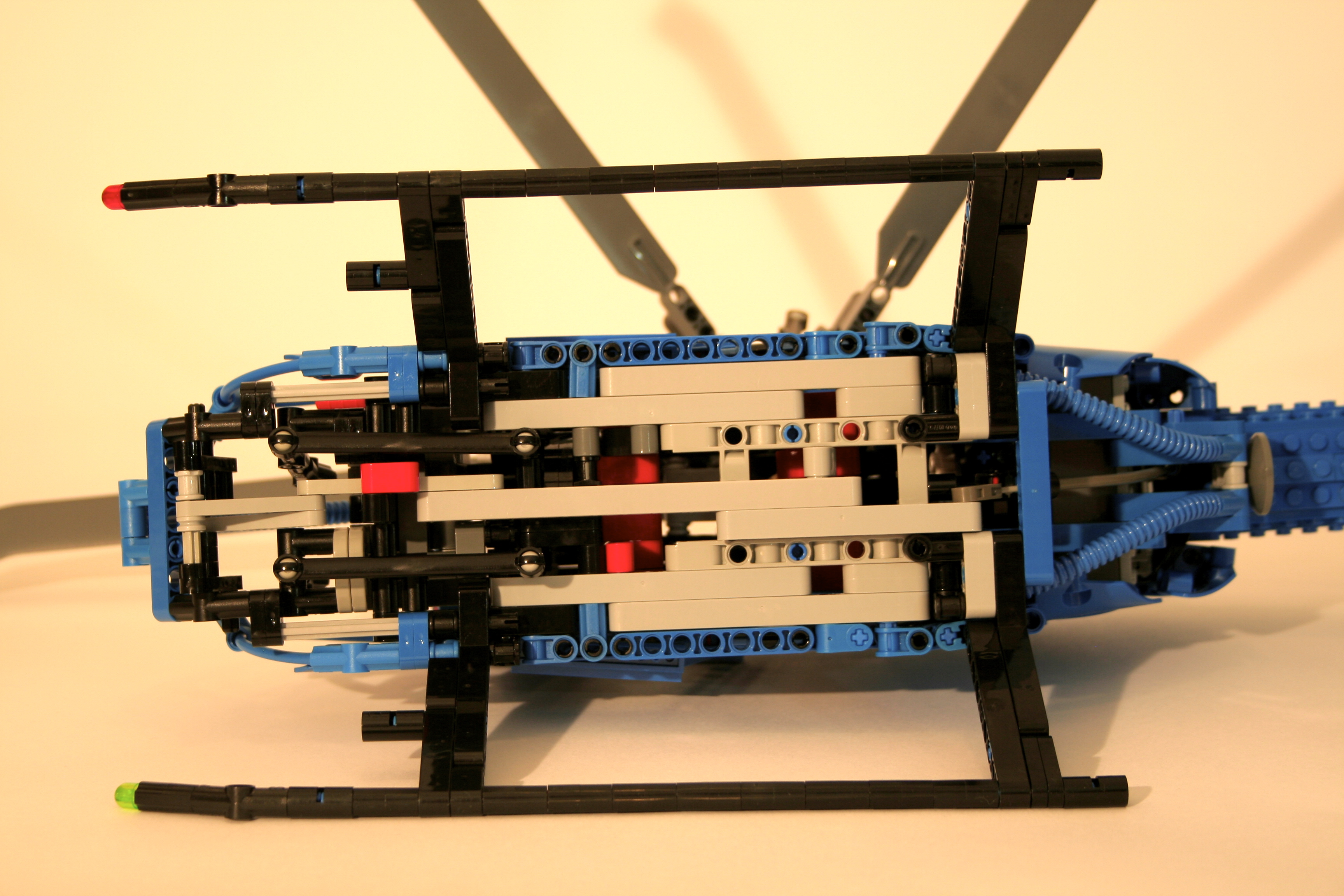
What excites me about building with LEGO Technic is creating functions that allow motor, movement, and control. Helicopters are mechanically complex, so I find myself drawn to recreating them. I learned about how they work when I built my first helicopter. With this new helicopter I started with the rotor head. I first built Effermans great swashplate design, and figured out what should stay and go. A four blade rotor head seemed not quite right, so after a little work, I managed to get a six blade head. It was with this decision, and discovering in the chosen scale there would be very little internal room, that I decided to switch to making an MD 600N.
I then got to work setting dimensions, and getting the scale of the airframe correct. The length of the rotor blades dictated the scale, and the interior was going to be tight. The major challenge was getting the control functions connect to the cockpit. This is not a new challenge, as it seems to be the case with every large plane I do. I have a lot of experience with it, and so I came up with some solutions. The challenge with a helicopter is the collective. Every movement that is transmitted, must be able to retail its movement while also being effected by the collective. This works well with the swashplate, but at the controls is where this gets difficult. Using the basis of Effermans design allowed for a simple setup where the collective moves an axle on which the the left/right and fore/aft controls mount.
Moving the collective moves the other two controls in a way that is independent from joystick inputs, and allows for complete swashplace articulation at any collective pitch. The controls connect to the swashplate above the main cabin and move forward. From there all three fuctions move down to the floor of the cockpit in between the pilot/copilot seats, and the second row seats. The collective is connected here to a lever on only the pilot’s side. The left/right controls connect via an axle to the joystick, and the fore/aft controls connect via a 9L link to the joystick. Both joysticks are linked together.
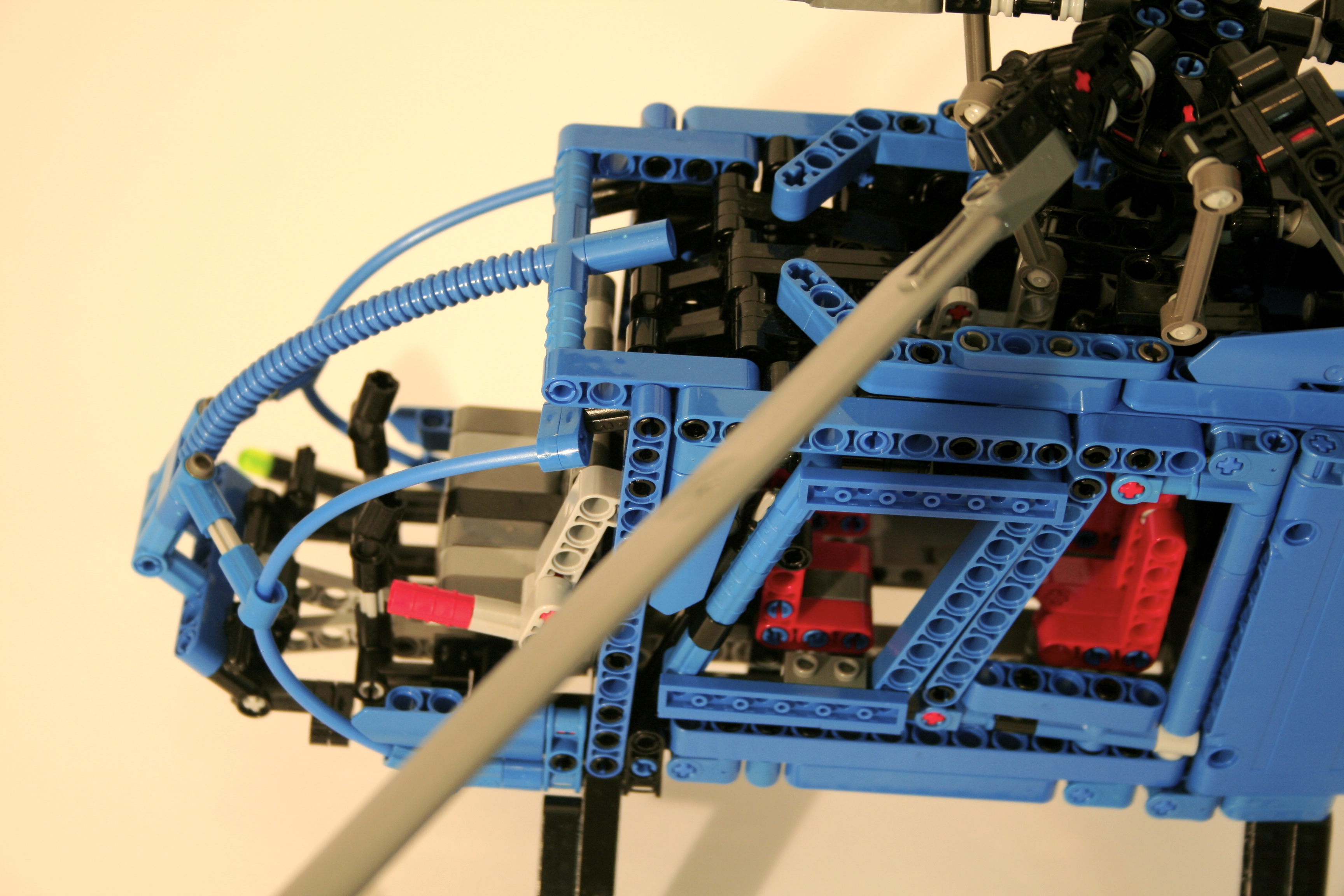
The final control adjusts the yaw of the aircraft. The MD600N uses three methods to give anti-torque to the main rotor. In forward flight the 1) tail planes give directional stability. The tailboom also has 2) two slits that provide a “Coanda Effect” from the main rotor downwash. Finally, at the end of the boom is a 3) movable jet direct thruster (all are nicely discussed here). This thruster rotates to force more or less thrust against the torque of the main rotor, much like the more common tail rotor. In this MOC, the thurster rotates on a small turntable, and has an axle running through the boom the controls the rotation. The axle connects to the floor petals by way of a flex cable, and a liftarm running below the cockpit. Both pedals are linked together.
Once all the controls were set, I could work on the body. I wanted the helicopter to be blue as I see it in my memory (almost). This presented some parts challenges, but not as many as I expected. The two suicide doors open to the main cabin, though I did not add any to the cockpit. Many liftarms and connectors were used for the rest of the cabin. I wish current Technic parts could facilitate the rather bubbly lines of the MD600N, but I was pleased with how it looked in the end.
As with many of my large aircraft, this helicopter suffered from gummy controls. The range of motion of the controls reflect the scale for the model, but do not allow for great playability or demonstration of features. For something like a helicopter, I am interested in powering the controls surfaces and inputs controls via Power Functions much like this. Next time I guess. But the Helicopter looks great on my shelf, and it brings me back to a great time in my childhood. I hope you enjoy.