These days, some projects are taking longer than they have in the past. The little Wiggs in my house and a mirad of other reponsibilities are slowing my production. This loader was started a little over a year ago, and it was finally finished last week.
I was sitting on a train in Chicago, and saw a little CAT 914k out the window, and thought, “I should finally make a loader.” I got home and started to work. My collection recently added the Fischertechnik tires and the pneumatic parts from the LEGO 42053 Volvo, so I started calculating the scale. Once the scale was set I worked on the linkage for the bucket. I spent two full nights working on the linkage to take full advantage of the longer pneumatic rams. I used the longer ones on the lift, and a shorter one on the tilt.
After the bucket mechanism was set, I worked on the chassis. The size allowed for four wheel drive. The rear axle was set in a pendular setup, which allowed for some articulation over varied terrain. The rear differential linked to a small I4 motor that was placed in the rear. The pneumatic valves were placed over the motor. The light on the roof operated the steering.
While the project took a little too much time to complete, it was a fun project that turned out well. The linkage and bucket range worked well. It also held a load well. The stability of the loader could have been a little better when pumping the pneumatic pump, as the suspension took a lot of rigidity out of the rear. The design allowed for normal LEGO 81mm tires as well.
Not only are my builds becoming smaller, I am also enjoying builds that offer a little more modularity. Why build one thing, when the one thing can play a number of different tasks?
When I built the Snowblower a couple of years ago, I made a couple parts of the truck removable. So after the build was complete made a couple of other options: different cabs, other beds, a crane. This kind of building continued with the 9393 updated tractor. I was hooked. So, when it came time to make a tractor, I had this feature central to the build.
The Atos started a couple of years ago when I completed the 9393 update. I wanted a front PTO in a small tractor. Lime parts were becoming more prevalent (though we are still missing a red medium wheel), so I figured I could make something work. I started with the front axle, as it would need steering, a PTO shaft, and something to lift an implement. The PTO shaft runs directly forward from the rear differential under the steering rack. Another axle runs a stud and a half to the left, which drives a worm gear to elevate the front drawbar.
The engine is mounted on top of the steering unit, and is connected to the rear differential. Off the right side of the engine is a changeover that controls the raear PTO. This drive moves to the rear, and then powers another PTO for the rear. The changeover lever is in the cabin, to the right of the steering wheel. As in the front, a worm driven drawbar is on the rear to mount an implement. A simple hitch is there for a trailer.
I build a front Lemken furrow, a rear Poettinger power harrow, and a front and rear Claas disco mower. I look forward to making other implements as well. Each attach to the front and rear by removing a 5l and 8l axle with stop. It’s simple, and allows for endless modification.
I am happy with the way the tractor turned out. It was strong enough to handle the play of my young kids, and all the functions worked well. I would have like to have an on/off switch for the front PTO. Other than that it turned out well.
Basically the whole point of this project was to make a mid scale truck that was orange. It seems like the only official LEGO sets I buy these days are the orange ones, so I have to use the parts for something. I found this nice little Arocs tipper truck, and I thought, that’s a great little idea. I started with the chassis which came together quickly. The two rear axles are connected via each differential, and drive a small 2 cylinder fake engine under the cab. The front two axles steer at different ratios, with a HOG gear going to the top of the cabin. A linear actuator is used to tip the bed, with controls on each side.
The tipper bed came together quickly, though I wished some additional parts were available in Orange. No problem, but in this age of LEGO Technic color proliferation, it would be nice to complete a color pallet before starting on another one. Anyway, the cab was little more tricky. Like many modern trucks, the grill is a rather unique. The Arocs uses four rows of little scoops with a large center star. Adding something similar on my truck required some creativity, and compromise. I fit only three rows, and recreated the scoops with cheese slopes. The top row was mounted level, and the two lower rows were mounted on hinge plates connected on the side of the cab.
The final model was sufficient, but not groundbreaking. It looks good enough; you can tell what it is, but it does not win any modeling contests. The steering worked great, as did the drivetrain. The tipper bed worked well, but required a little muscle at the early stage of tipping due to the leverage. The tilting cab worked well, but in its resting state was a little too loose. Maybe someday I will edit the grill to make it better, but for now, it works.
Everyone once and a while I see a design I like so much, I copy it. So thanks to Horcik Designs on the fun little Fire Truck that I copied. Thanks for the inspiration.
The full gallery may be found on Flickr and Brickshelf.
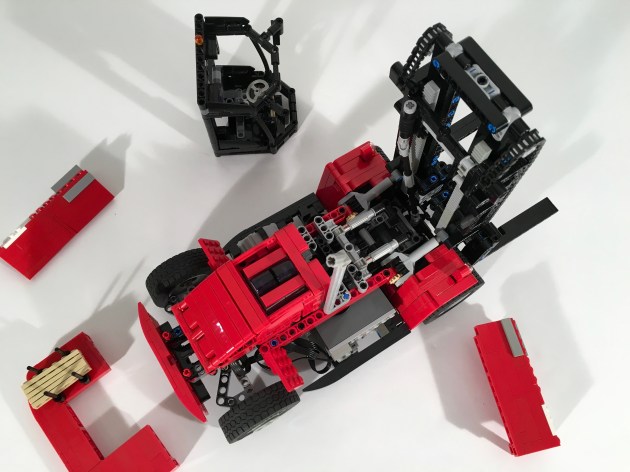
When I found Horcik’s fun little Fire Truck, I was immediately enamored with the look of the truck. After deciding I was going to make it, I started looking for additional features to add to the excellent design. After finding some great ideas of a Renault version (2), I decided to get to work. The truck started with a 4×4 driveline and an I-4 engine. I used a simple live axle setup with 9l steering links to keep the sway movement in check, and both axles used a Panhard link. The steering was actuated with another 9l steering link, rather than the more common rack and pinion setup. This allowed for a lower engine mount, and something a little different in the design. The steering can be moved by both lights on the roof of the cab.
Which brings us to the cab. I wanted to use the face of Horcik’s truck, but wanted to add some changes. I added two doors to make the cab a little longer, and added four of the new panel parts that work great as seats. Then I made sure the cab could be tilted simply, and connected the two roof lights to the steering. You can see the engine and the steering when the cab is tilted.
Then off to the body. It turned out to be more simple than I had planned. I had some ideas for a hose reel, a roof mounted water gun, and various cabinets with tools inside. Every idea I tried was a little ugly, or boring. So, I closed up the design with a couple of water tanks inside the body of panels. It’s not fancy, but the design turned out clean, which is what attracted me to the project in the first place.
The design worked fine, though the front axle could be a little more robust. It was not a complicated build, but it was a fun one. Don’t worry, there will be complicated builds coming soon.
About 3 months ago I purchased a set of four Fischertechnik tires from ebricks.ru. After seeing a review of them by RM8, I reached out to him, and he mailed me a set. After a little time, I finally have something to show with them.
After playing with a number of ideas, I decided to do another Unimog. It’s easy to motivate myself to build a vehicle I love. This time, I wanted to do the unloved U90 (418) version. It was not a terribly successful version, as many find the hood…not one of the best. But few people have built this version, so I was up for it. I put to to a vote on Eurobricks, and the decision was to build it in green. Off I went.
The scale required a 27 stud wheelbase and a 19 stud width. I built the front and rear axles and tied them together. Through a couple of edits, I finally added the suspension and figured out how to get portal axles into the truck. The Power Functions XL motor was mounted just over and in front of the rear axle driving power to all four wheels. The Servo motor was placed directly ahead of the XL for the front axle steering. I added a four cylinder fake engine over the front axle. The rechargeable battery box was placed over the rear axle.
The suspension is a live axle setup, with four hard shock absorbers at each corner. Each wheel has about 2 studs of travel. Not much for a Unimog, but enough for a 418. At this point I started a draft of the cab, and a draft of the bed. At this point the truck had an identity crisis. Move forward with green or find another option.
Building LEGO Technic with green is not the easiest. The color lacks 1×5 and 1×11 beams. Both of the these parts would be needed for the bed and the cab. I could make some things work for the 1×11 in the hood, but there was no other option (read, inexpensive option) for the 1x5s needed for the bed. I toyed with other colors for the bodywork; orange, white, blue, yellow. None of them had the right pop I was looking for. Other than the orange, but, as other have said, orange has been done too many times. Then it dawned on me, “why not use plates?” I had my solution. With one bricklink order, I was done.
The truck drives well, and is easily controllable. The front portal axle can use a little strengthening, so serious trial abilities are lacking with this truck. Both the bed and the cab can be easily removed. I ran out of space for a ram to elevate the bed, but it can tilt three ways. I was pleased with how the truck turned out. It looks great. The driveline coule use some improvements, so I will make those improvements on the next truck.
In what is becoming a little bit of a theme, I submitted another design for a Lego contest. In the long line of Eurobricks.com contests, the Technic Challenge 10 called for a pneumatic build. Challenge accepted!
The contest had very few constraints other than the build had to use Pneumatics. As I have mentioned before, working with pneumatics is not my preference. I don’t like them, so it was good for me to step out of my comfort zone.
I was feeling especially creative this time, so I thought about a number of concept ideas. Pneumatics do not tend to work smoothly when lifting arms so I decided against an excavator and a loader early. Additionally, I was not willing to invest in additional parts for this project. After a couple of drafts, the idea of this bulldozer was born. Taking some inspiration from some of John Pope’s design, the basic idea was there. The dozer would have different tracks, a three movement blade, a crazy engine, and a forward thinking design.
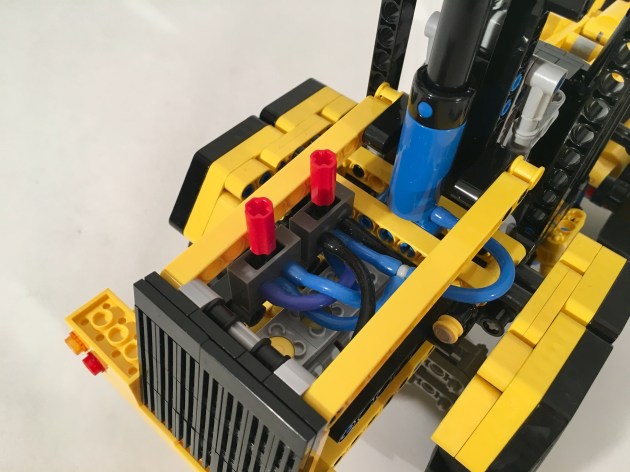
I started with the tracks. After moving the axle points four wheels countless times, I came up with a design I liked. I made another one, and linked them together. The I worked on the blade. The dozer would have a lift, tilt, and side to side angle adjustment. After playing around with some idea, I found a solution I liked. Two pneumatic rams were on the front to lift the blade on the top. Then two links were connected low on the two sides of the blade, and then on each side of the dozer. These points on the dozer were moved fore and aft by on pneumatic ram each. These side rams would move the blade left or right individually, or together they would tilt the blade up or down. Additionally, it allowed all the tubing to be internal.
I added a small compressor powered by a Power Functions M motor, and the battery box under the cab, and added the 16 cylinder engine (coupled V-8 and Flat 8). The cab was easy to get the shape I wanted, and gave me some space for another pneumatic ram to open the hood. I then decided to add a ripper since I had one pnuematic left. The new 1×11 ram a great addition, but a little more power could have been used for the ripper.
I was pleased with the look the bulldozer. The functions worked well, but on reflection, the were not exciting enough to be competitive for a contest. After two pneumatic builds in a row, I find some of the frustrations I have with them remain, but I am discovering some charms as well. We’ll see what comes next.
This year, it seems like everything about LEGO Technic is about Porsche. LEGO created a 911, and started a contest for creating your own Porsche. Porsche is all everyone is building and talking about.
So I made one too. The Rebrick team posted a contest to design your dream Porsche, and thinking of the words of Mr. Porsche, “I couldn’t find the car I dreamt of, so I decided to build one myself,” I set to work. My dream Porsche lives in the spirit of the 914 and the 924: A compact, lightweight, mass-market, rear-wheel-drive sports car. It has a long hood, short overhangs, and a roofline that alludes to Porsches of today and yesterday.
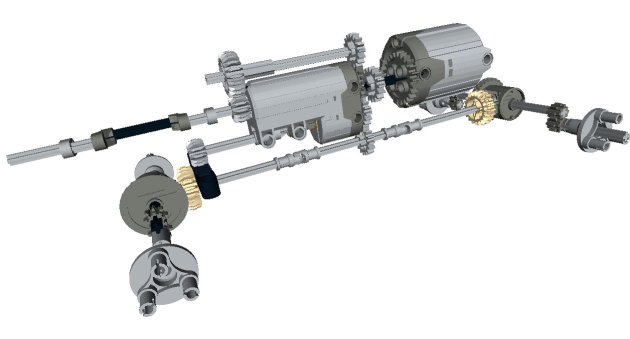
I had six weeks to design a car. In a week I had the front and rear axle, and the transmission. The transmission is a similar unit to the one I had in the ATS. Six speed manual, with a single point shift lever. It keeps the gear changes quick with short throws. The rear axle is an independent suspension design, with short upper swingarms, and long lower swingarms. This changes the camber of the wheels as they move through the suspension travel, to keep a consistent contact patch around a corner. The limited slip differential is mounted longitudinally behind the axle. The front suspension is also independent with short upper and long lower swingers. The are mounted to a steering uckle that gives both Ackerman and caster geometry.
Because it was my dream car, I wanted a car that would be inexpensive, and teach me how to drive fast. A front engine, rear wheel drive is a less expensive car to design and build. Additionally, my car would have a Boxer 4 for lower cost, and an option for Boxer 6 for more performance. Since I can use some training to be a better fast driver, I though a roll cage would be necessary.
The remaining five weeks were spent working on the bodywork and the interior, which always takes more time than you think. I fit the cabin in around all the mechanical bits, and was able to add a glovebox and a manually adjustable tilt steering wheel. The seats are simple, but match the car interior well. I wanted to keep a couple of features that were iconic in my mind with Porsche cars: Round headlights, a full width thin taillight, a curvaceous roof, hunches over the rear wheels, and a taller greenhouse. After many drafts, I was able to get a design I was pleased with.
The car turned out how I wanted, and I felt it was a good contribution to the contest. The front of the car did not turn out how I envisioned it in my mind. The rear did not look as clean as I wanted. Mechanically the car works great. The suspension works perfectly, and the steering works flawlessly without hitting the wheel fenders. The transmission is great, and the limited slip differential continues to do the trick.
After all this talk about Porsches, I’ll take some off and build something different.
Every once and a while, I find myself building an older set from my collection. I find it relaxing not to think about design and simply follow instructions. Recently, I built LEGO’s 2012 set 9393, and after a couple of days, I thought, it needs something else.
The full gallery may be found on Flickr and Brickshelf. Instructions may be found here.
The LEGO set was simple with steering, lime green color scheme, a mower implement, and a system to raise and lower the implement. I decided it needed a fake motor, front suspension, a drive differential, and some bigger front wheels. I started building. Adding the motor proved to be more difficult than I thought it would be. By adding the larger front wheels, I was able to get the steering axle lower by one stud. This allowed space for the engine to be added, but did not solve the structural problem of how to mount the front suspension. I ended trying a number of solutions, but ended with one with many connectors, axles, and two liftarms running over the front axle beside the fake engine. I would prefer it to be a little more stiff, but it works. As I built the front of the tractor, I found myself adding an implement attachment point. I thought, maybe I should make another implement for the front.
This is where the project grew, and grew….
Now, only the mower implement was not enough. The tractor needed a plow, counterweights, a furrow, a harrow, a tiller, and a grain cart. All of a sudden this project became much bigger. I started with the snow plow. It is a simple design with a little worm gear lift attachment. Using this type of mount, I constructed a simple furrow implement as well. The multiple wheels are meant to smash larger clumps of dirt, and push stones down under the soil. I added a basic group of curved liftarms for front counterweights. All three implements are attached by removing two axles.
Most tractors have a three point attachment on the rear. The base 9393 has a two point attachment, which does not allow for a parallel movement as the impliment is raised. I went back and forth on changing this attachment point. In the end, I decided adding a parallel linkage would require a another PTO universal joint. I was not willing to add this, as it would put the implements too far behind the tractor. As such, I kept the stock 9393 motor implement the same. Using the same attachment point, I build a small harrow. The harrow is driven by the PTO shaft. Finally, I build a tiller with the fun little claw parts. I added a drawbar and a pivot, so this impliment would stay parallel to the ground.
Because I still did not think this was enough, I added a hitch to the tractor, and built a grain cart. It is a simple single axle design, with sloped sides. There is a conveyor on the bottom, and a folding auger for grain extraction. Both are geared together and can be opperated by a rear HOG gear. OK, I realize it is not an auger, but rather a chain. At this scale, I could not figure out a good auger solution that did not look clunky.
Before I could think of more implement, I said “I’m done.” I was please with how it turned out. All the implements were fun, and give the MOD much more playability. The grain cart was fun to build, and made the tractor look grand. I wish the chassis of the tractor was a little stiffer for the front suspension. I had a lot of fun with this build. I am going to build another tractor before this year is done.
After doing a lot of non powered builds, it was time for me to do something motorized. I very much enjoyed doing a forklift a couple of years ago, so it was time for another one.
The JCB930 that I did a couple of years ago was non-motorized and had some great features. I wanted to build something with all the same features, and since I would need more room for all the electronics, I decided early to model the forklift after the Kalmar mid-sized 180 model. The model would have drive, steering, a two stage lift, and fork tilt. I did not realize how hard this would be. I wanted to keep the boom clear for visibility, and the forks not more than two studs in front of the wheels to keep integrity of scale.
I set the scale and I went to work. After setting the chassis measurements, I went to work on the fork and boom. I knew I wanted to have a two stage boom, and I wanted to keep as much of the boom open as I could. The forks connect through the middle of both the first and second stage booms, and pinch both together. The middle boom is has a gear rack on both sides to lift the forks. This boom has two gears at the top, to route the chain over the top to move the forks. The outer boom is connected to the chassis at the bottom, and two mLA connect to it operate the tilt. After some working, I was able to get the boom to be thin, and just how I wanted.
I decided early that I want to keep the motors out of the boom. So I had to route the lifting function out to the forklift body through the bottom pivot. This required routing the lifting axle under the drive differential. The lifting axle then move rearward, and connected up to a PF L motor. On top of the lifting axle was the drive axle. The PF XL motors was mounted transversally on the right side, and drove and axle forward to connect directly to the differential. To give me some additional space at the front, a portal axle was mounted on its side to move the differential rearward. A PF Servo was mounted in the rear, over the steering axle, and drove the steering function. The steering uses some 2×4 liftarms mounted at an angle to allow for a better steering angle. Finally, a PF M was mounted in front of the Servo, under the cabin to drive the tilt function. None of the mechanics were difficult, but the packaging required a number of drafts.
The final hurdle was the body work. I spend a lot of time early in my MOCs working on packaging placement, so I do not have many body work problems later in the build. Still, some simple SNOT work was needed on the side sills to fit about the battery box, and the XL motor. Oh, and the wires. The cab was pretty straightforward, but still took a little bit of time. Finally, I had some trouble with the rear engine cover and counterweight. In the end it was a simple design that I settled on, but I tried many designs. Again, this took a lot of time.
It took a long time, but I am pleased with the final product. The functions worked smoothly and consistently. The control that was afforded by the fork functions was great. It could lift three AA battery boxes at a time. The steering was quick, and had a great lock which gave great maneuverability. The XL motor provided adequate power, and moved the forklift well. Finally, the bodywork represented the original Kalmar well. I hope you enjoyed as well.
I find myself on diecastmodels.co frequently as it inspires many of my future builds. Most of the time the site gives me reference pictures, and sometimes it shows me something I have never seen before. This is the result of one of those late night browsing sessions.
See the full gallery at Brickshelf and on Flickr. Instructions may be found here.
I wanted to make a scraper, and once I was browsing this site, I came across the K-Tec. It was a different set-up that I thought looked fun. I was hooked. Early I decided the MOC would be perfect for the newer 49.5×20 tire, so the tire set my scale.
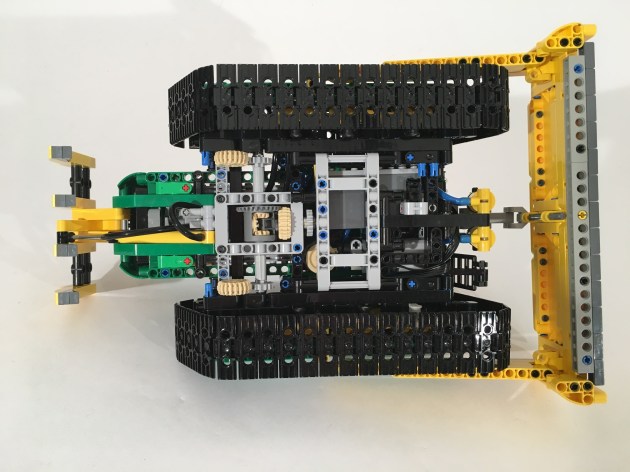
I started with the suspension for the tractor first. I did not have too much room to work with on the rear, so I set two differentials together, and connected them via two 20T gears. The rear one connects above to a 12T gear, which transmits rotation to the fake motor in the front. The two axle assembly pivots at this gear connection and connects to the rear wheels, so no u-joint is needed. The middle axle connects to the rear assembly through the differential connecting axle. This simple set-up allows for all four wheels to move freely, and independently.
I then added the front cab. It is not too complex with a differential fixed for the front axle, and a two-cylinder fake motor above it. A HOG gear is above the cabin which pulls a liftarm for the steering. A turntable is used to provide articulation between the cab and the rear chassis. Then a simple body was made, and off to the scraper.
I then worked on the scraper part; kind-of. I knew when I started this project I would need a bunch of 1×6 arch bricks in yellow for the front gate. There are not many of them, so I started ordering them over the course of three months. As each would arrive, I worked on the scraper. I first set the dimensions and worked on the lifting mechanism. It was a little tricky to find the correct geometry while not taking too much room, and keeping the upper pivot point small while using to mLAs for the movement. I found a good solution, but a little more stiffness in the assembly would have been great. I added an extraction plate at the rear driven with a worm gear assembly resting between the rear wheels. Another stud of travel would be great, but it was not worth adding another four stud gear rack to make that happen. Finally, all the parts arrived for the front gate, so I installed it. Because the walls of the scraper are only one stud thin, I did not want to mess with the thickness of the sides to much by adding a mechanism for the gate movement. Each assembly I tried with a mLA or a worm gear set-up looked clunky or bulky. I ended up with a friction pin with a gear to move it. It is not very fancy, but it works well. At this scale, it is all that needed.
All in all, the MOC turned out OK. It would have been better to have a stiffer hitch arm, and I would have liked a different solution for the entry gate. I was pleased with the size, and I enjoyed packing a number of features into the small (but long) MOC. Finally, for some reason the MOC does not please my eyes as much as those first pictures I saw on diecastmodels.co. Maybe it just needs to be a little bigger.