Rumble Bee
June 3, 2012 8 Comments
It has been six years since I bought my F1 Wheels and Tires. I bought four, and I paid a lot for them. To date, I have used them once in my Red Sedan; and only two of the four that I own. For some reason, I decided I needed to use them again and I wanted to do a small little project. I was recently reminded about a childhood video game P.O.D. racing, and thought the car I was designing would fit right into the game.

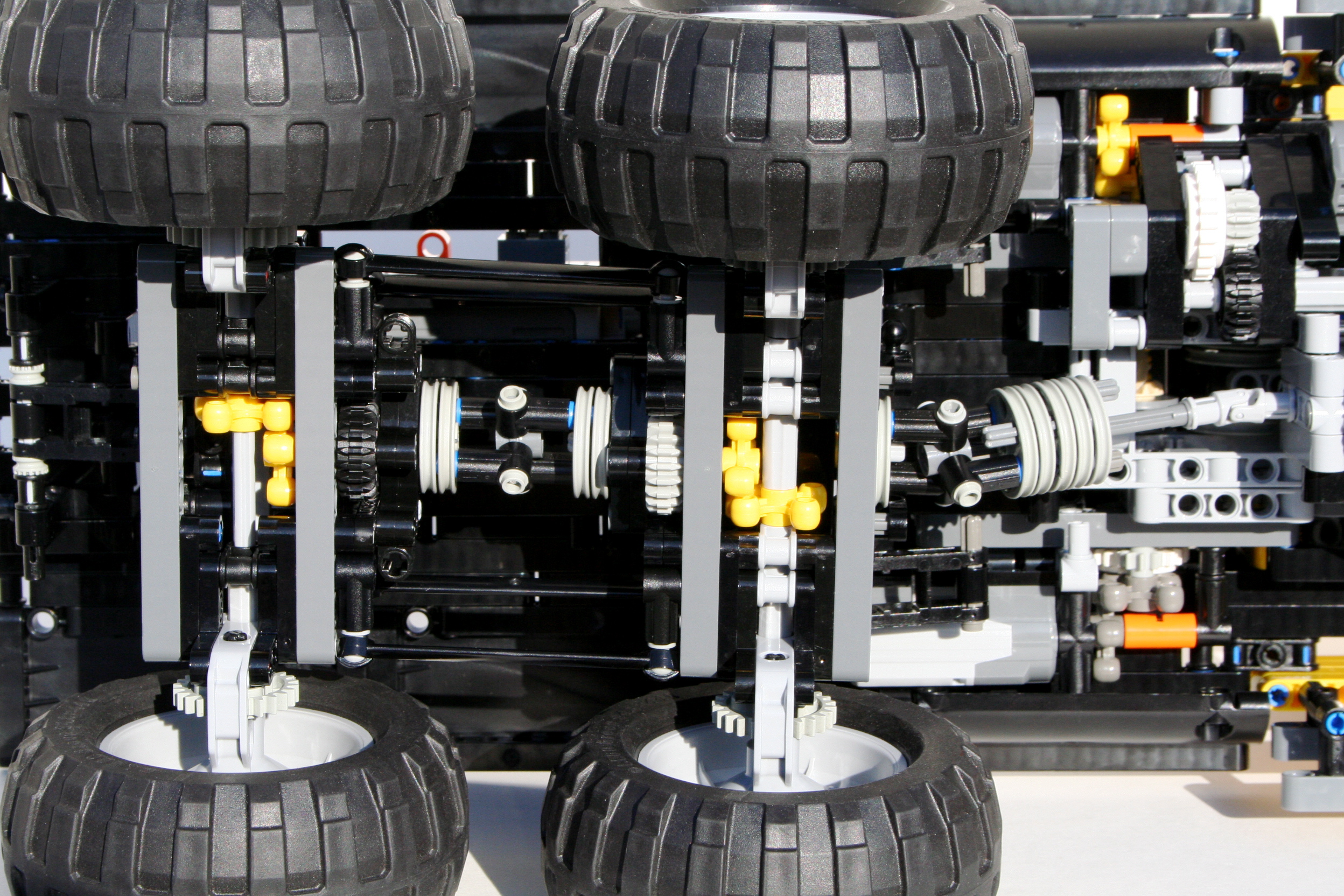
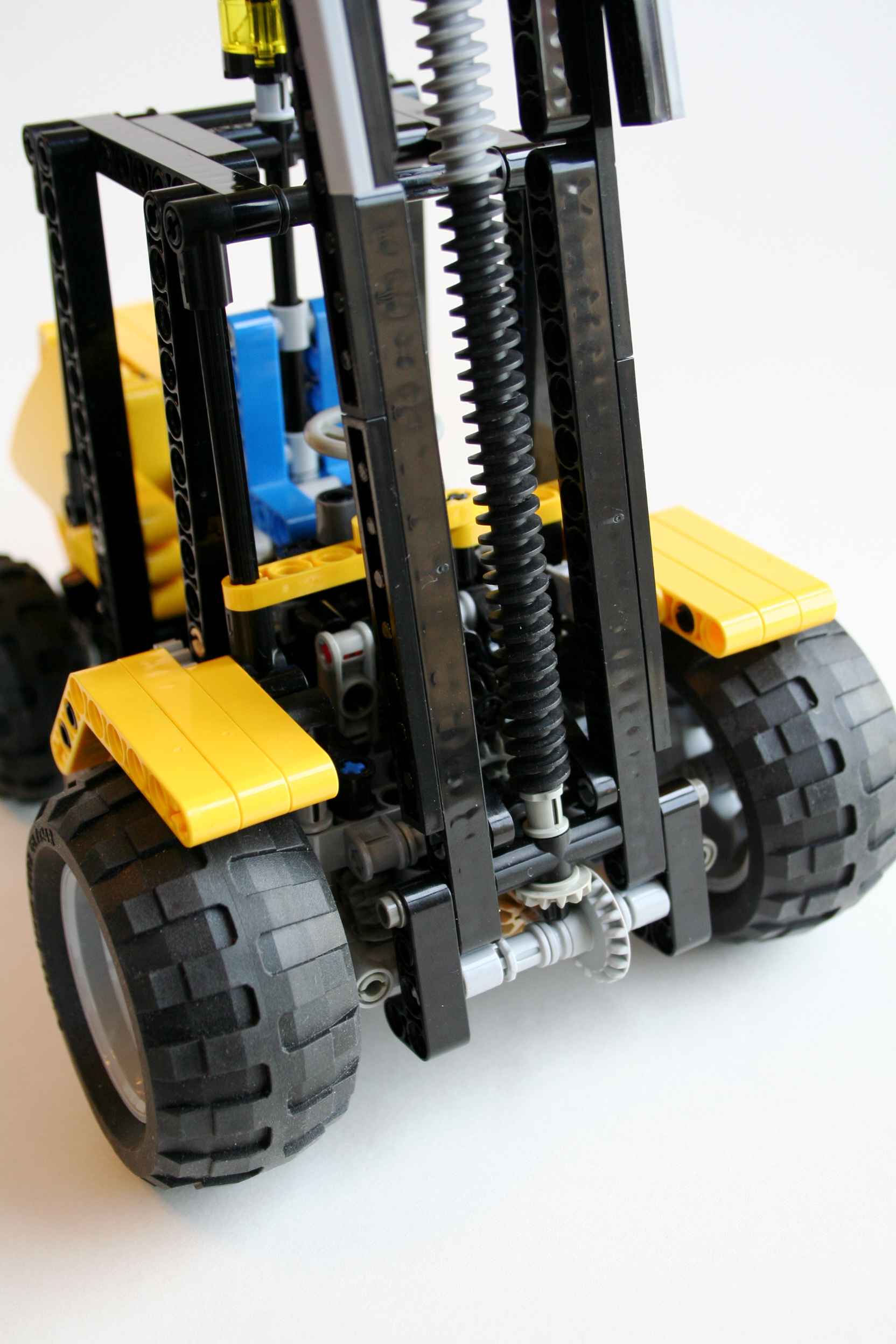
The car is a simple design; a drive motor, a steering motor, a battery box, and a receiver. I knew I was going to design a three wheel car. I wanted to have the rear wheel driven by a PF XL, and a single PF M with a simple return to center system for the steering. After a couple of designs, I decided to place the PF XL motor in the hub of the single rear wheel. I tried a couple of designs to gear the motor up for a little more speed, all with various locations in the car. Nothing worked as well as I wanted. The speed was sufficent, and placing the motor in the hub allowed for a super short wheelbase.
Because the PF XL was place in the rear, I had a lot of space for the rest of the Power Functions equipment. I placed the battery box directly in front of the rear wheel right at the bottom of the car. The front steering axle was place next in front of the battery box. The car had a short wheelbase of only 18 studs. On top of the battery box, I placed the PF IR reciever and the PF M motor which was for the steering. The steering motor passed an axle straight through a Spring Loaded Connector to move a 3L liftarm which connected to the steering rack with a 6L steering link.
I added a simple body using the orange panels from 8110. Keeping with to story of P.O.D. I wanted to keep an agressive stance and look to the car.
The car ran well, and was plenty quick. The steering was sharp and the car was well planted on the road. I had a good time with the design. Now I need to come up with another use for my F1 wheels.
The full gallery may be found here, and instructions here.





















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}