Freightliner M2
May 25, 2012 1 Comment
For some reason, I often find myself building two trial trucks at the same time. While I was building my ZIL 132, I also wanted to try something with floating axles. The model would use 6 wheels, a 3 speed transmission, and fully suspended live axles. I also wanted to model the Freightliner M2 Business Class truck as closely as I could.

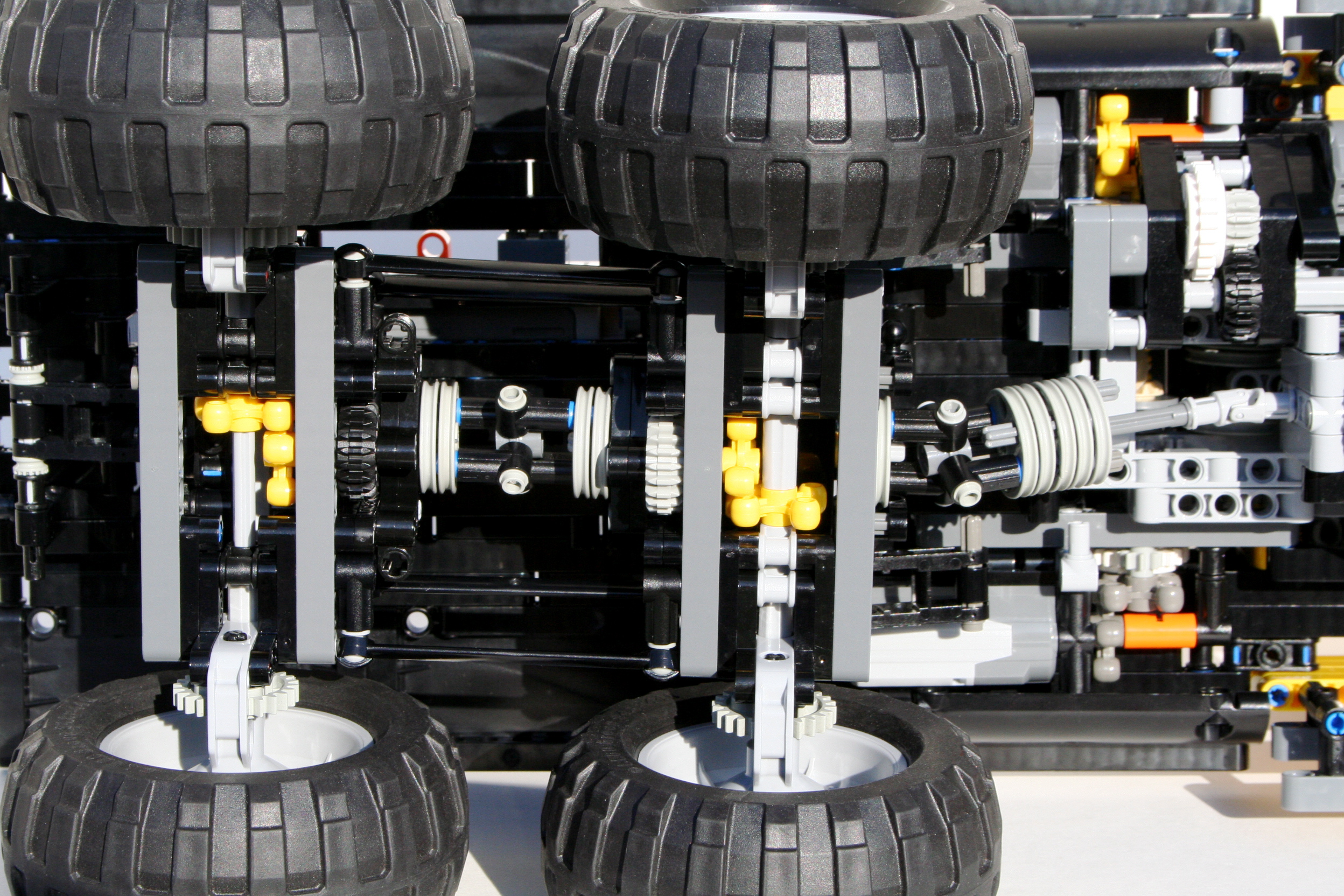
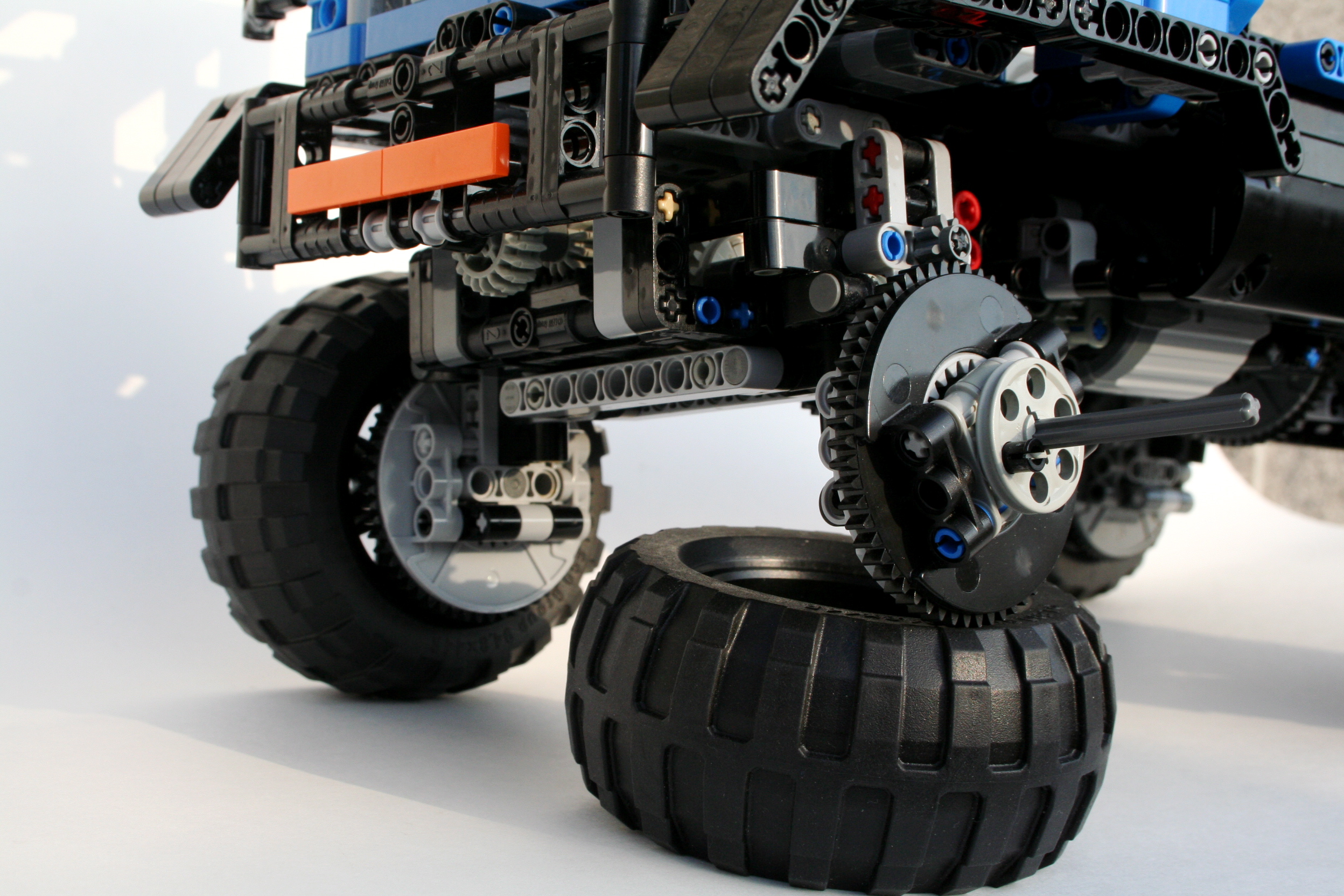
The model started as my trucks usually do; with the axles. The second and third axles would be identical, and would be connected with a simple pulley wheel universal joint between the two. To keep the speed through the universal joints high, and the torque low, I used as 12z/20z gearing after the universal joints, then the knob wheels to rotate the axis, then the normal 8z/24z gearing on the portal axles to finalize the drive. This also allowed me to keep fewer knob wheels as the second axle had the drive shaft from the transmission pass uninterrupted to the rear wheels. The final drive ratio for the two rear axles were 1:5.
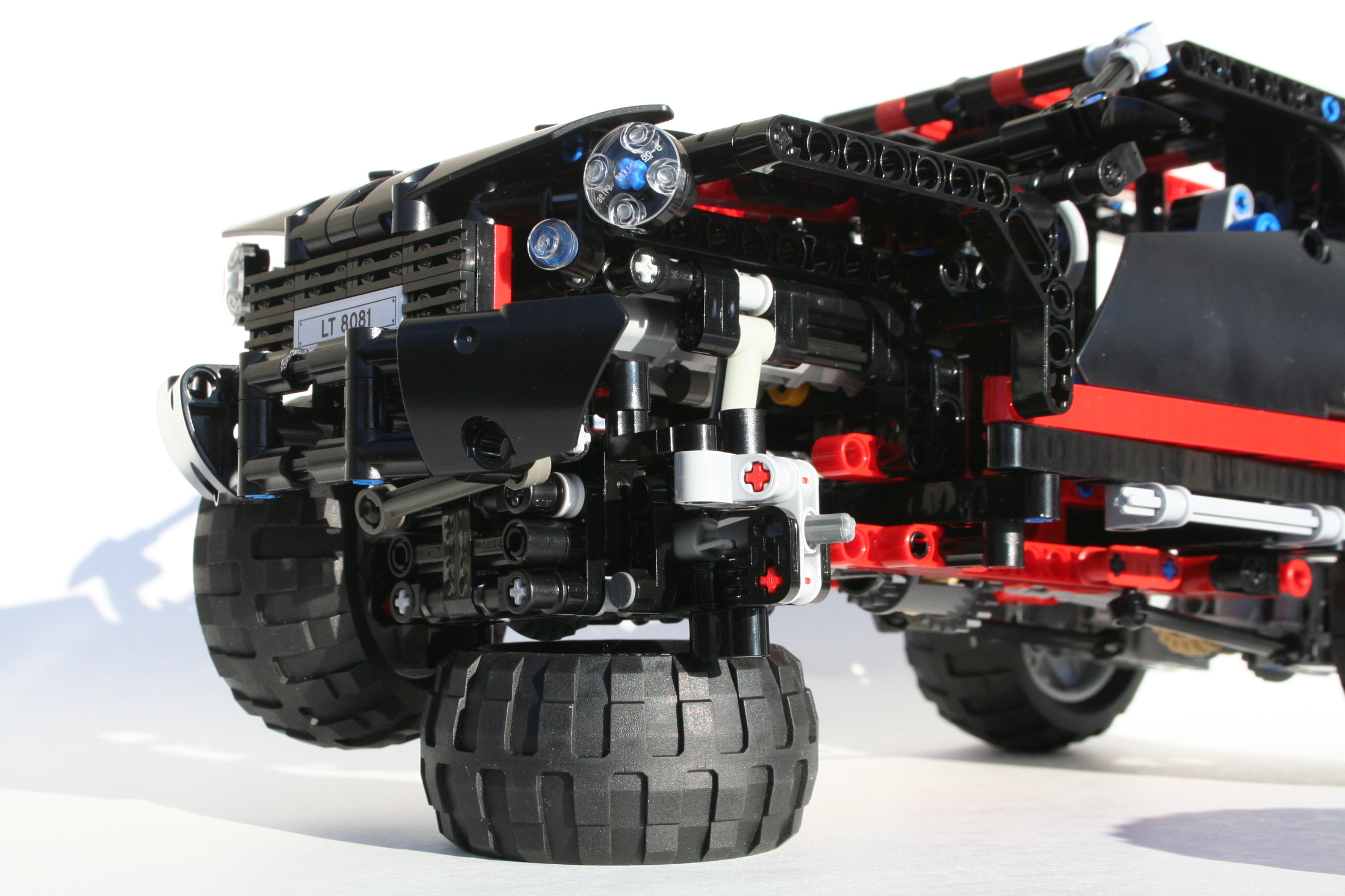
The front axle was a little more work. I wanted to have the steering motor mounted on the axle so I would not need to have a steering shaft connect to the front axle. This proved too difficult, as it would raise the PF XL motor that I was going to use for the drive to high on the truck. I decided it would be better to mount the steering motor on the frame and connect to the front axle via a CV joint. Once I made this decision, the front axle became easier. I used a 1:3 gearing on the portal axles, a knob wheel, and then a drive shaft back to the transmission. The steering axle would exit just above the drive shaft on the axle to move to the right for the steering motor.
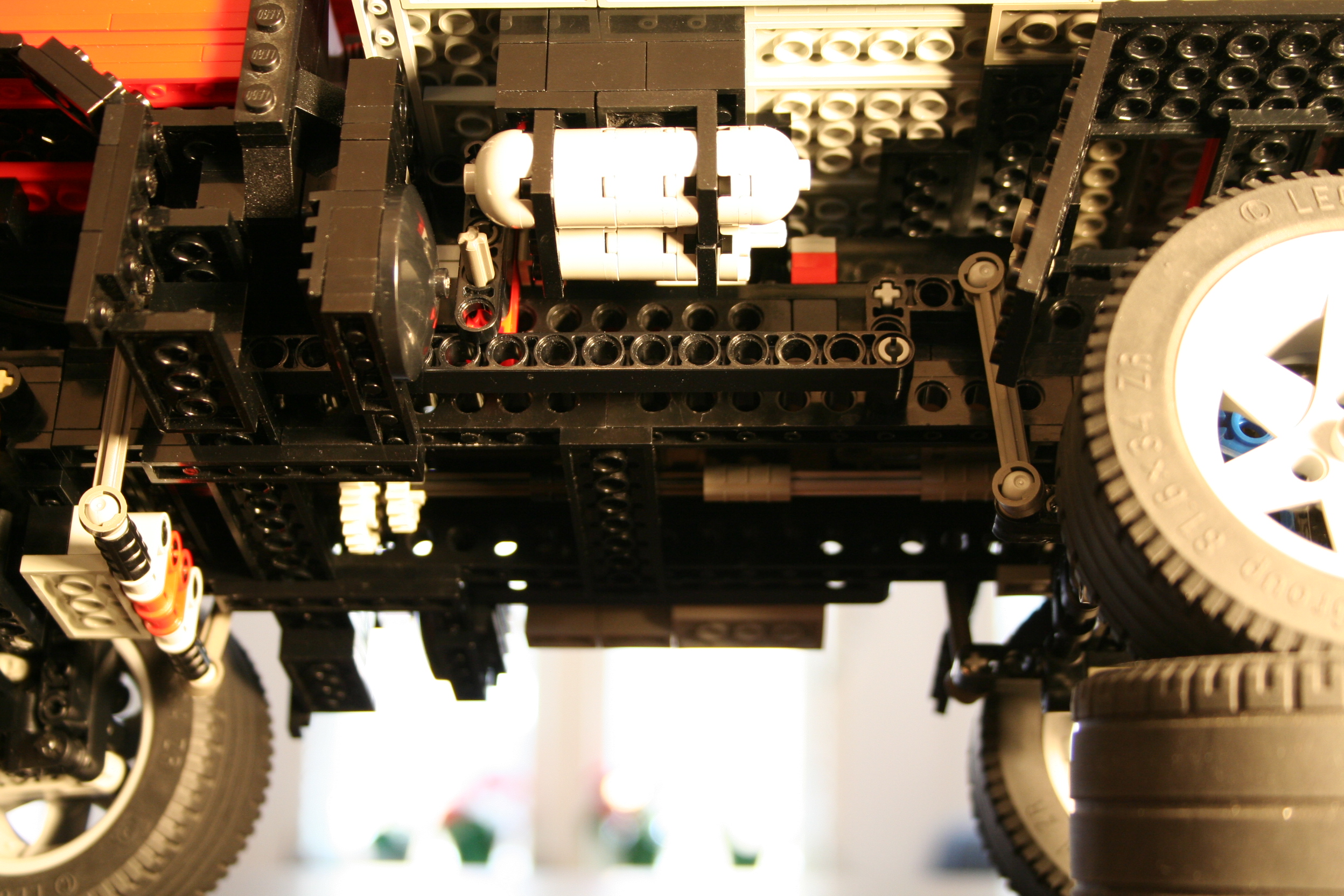
The frame was pretty simple. Once I had the transmission placed, and the axles spaced, it was simple to place the suspension components, and the shock absorbers. Each axle had two steering links mounted vertically which connected to a 3×5 liftarm which would activate a shock absorber; very much like Lyyar’s design. Each axle had a steering arm to keep the axle from swaying laterally. Finally, all three axles had a number of 9L links to keep the various movements maintained.
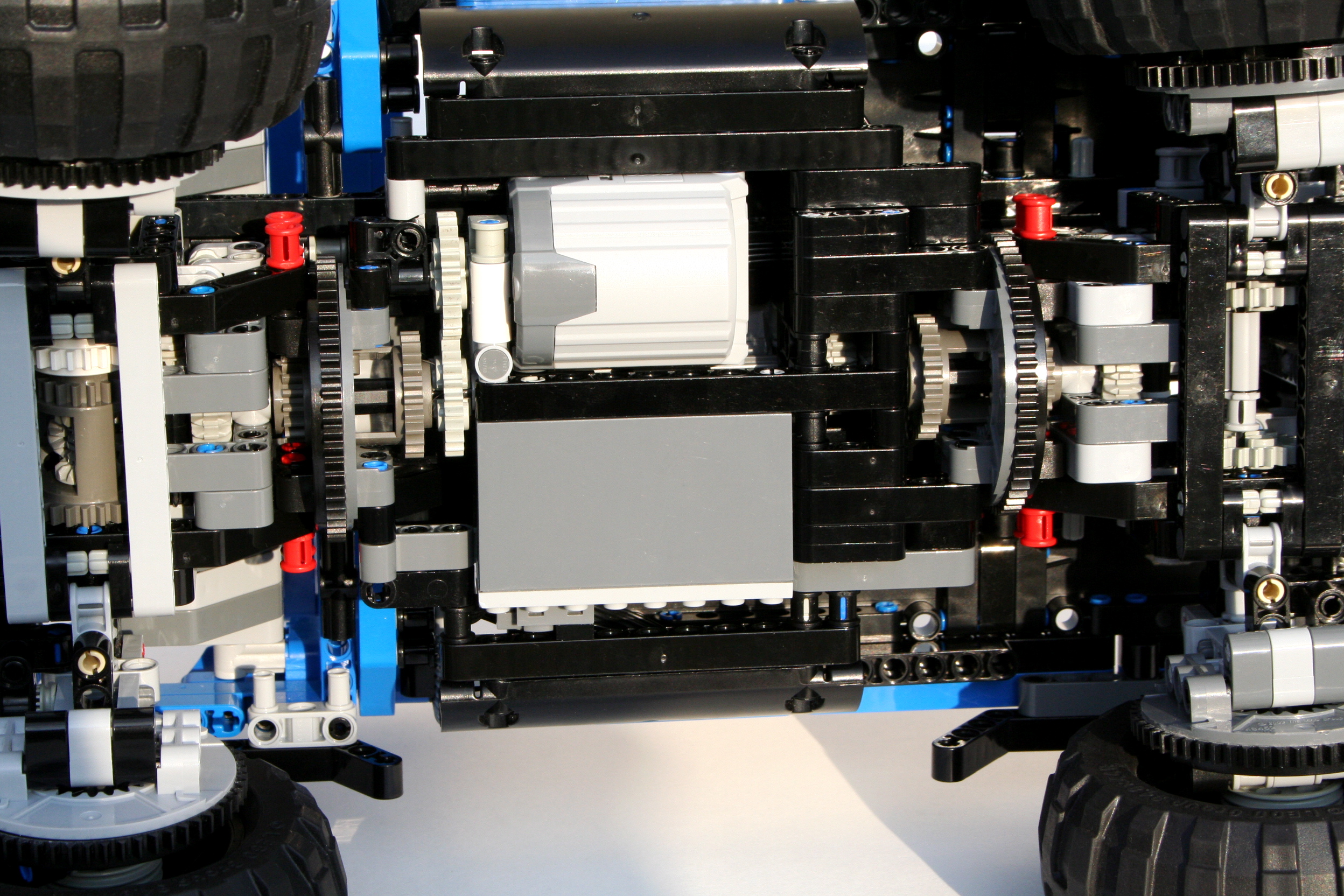
The transmission was going to be placed behind the PF XL motor which was under the hood. The changeover mechanissm would be placed in the center of the truck with the changeover motors mounted longitudinally, on both sides of the truck. The PF XL motor was place directly above the first axle, and was mounted on a moving frame that was moved by the changeover. This allowed a moving frame to work its way through the three gears. The ratios were 1.25:1, 1:1.25, and 1:2. This allowed for final ratios of 1:4, 1:6.25, and 1:10, which was more than capable for most terrain. The drive and steering Battery Box was mounted over the second and third axles, and the gearbox 8878 battery box was just behind the changeover in a little box on the bed of the truck.
Finally, like always, a simple body was mounted. I had a little trouble getting the look I wanted on the front of the hood, as the suspension components kept getting in the way. I added a bed, covered the changeover and motors, and a couple more details and everything was finished.
The model was not my best driving truck, as six axles do not want to always work together. The suspensions was supple, and I was getting no drive or steering input on the suspension. The truck worked well over various terrain, but struggled on some on step obstacles. The transmission mounting worked well at changing gears, but gears did not have a strong support, and I found they liked to skip at times. I liked how the suspension worked, but I do not think it brought enough of a valued to use this system again. It had moderate improvement on dealing with terrain, but it placed a lot of stress on a number of parts, such as the frame, the axles, the driveshafts, and the universal joints. The next truck will use a pendular set up again.
The full gallery may be found here.
































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}