K-Tec 1233 Scraper
March 7, 2016 1 Comment
I find myself on diecastmodels.co frequently as it inspires many of my future builds. Most of the time the site gives me reference pictures, and sometimes it shows me something I have never seen before. This is the result of one of those late night browsing sessions.
See the full gallery at Brickshelf and on Flickr. Instructions may be found here.

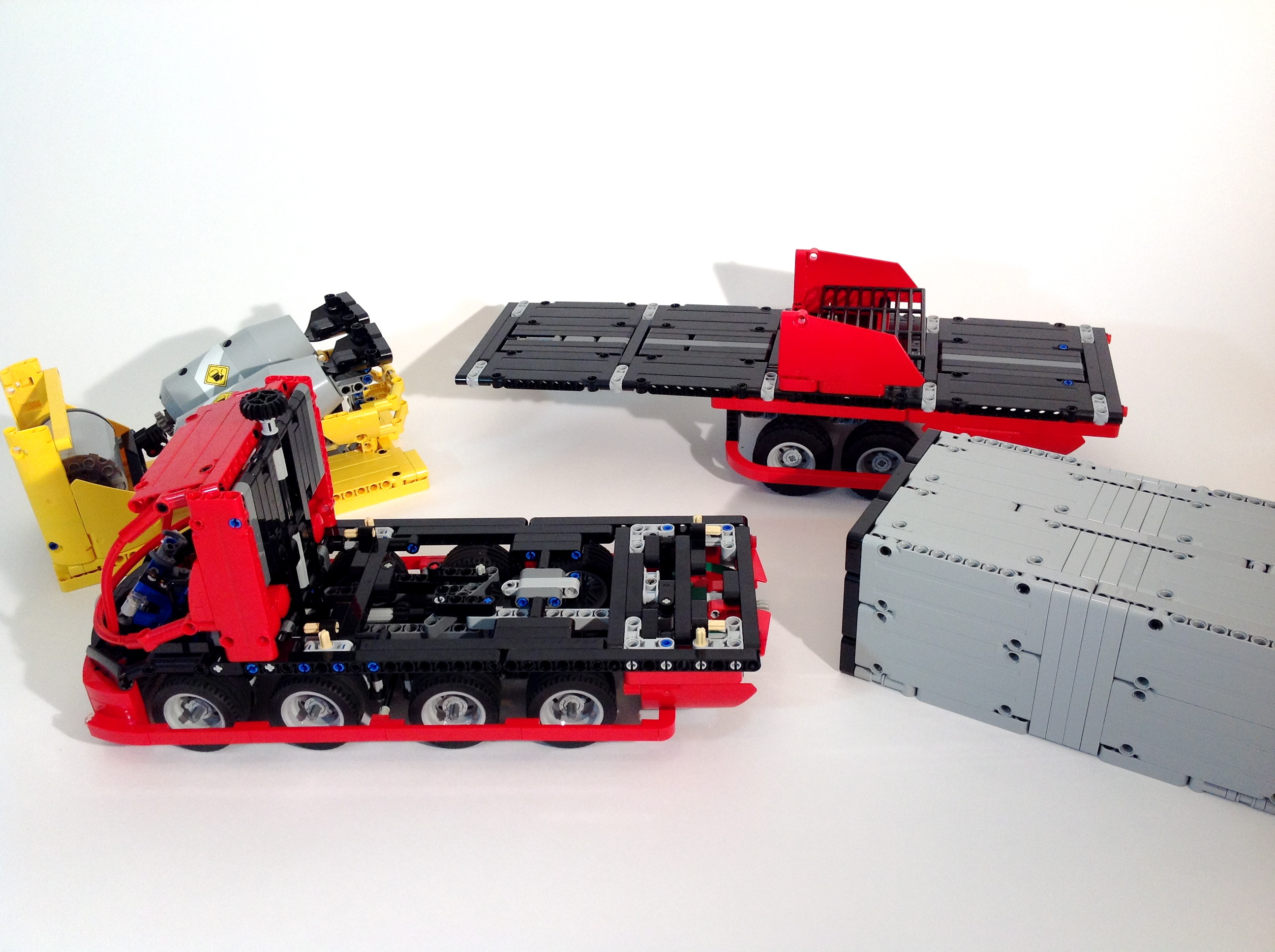
I wanted to make a scraper, and once I was browsing this site, I came across the K-Tec. It was a different set-up that I thought looked fun. I was hooked. Early I decided the MOC would be perfect for the newer 49.5×20 tire, so the tire set my scale.
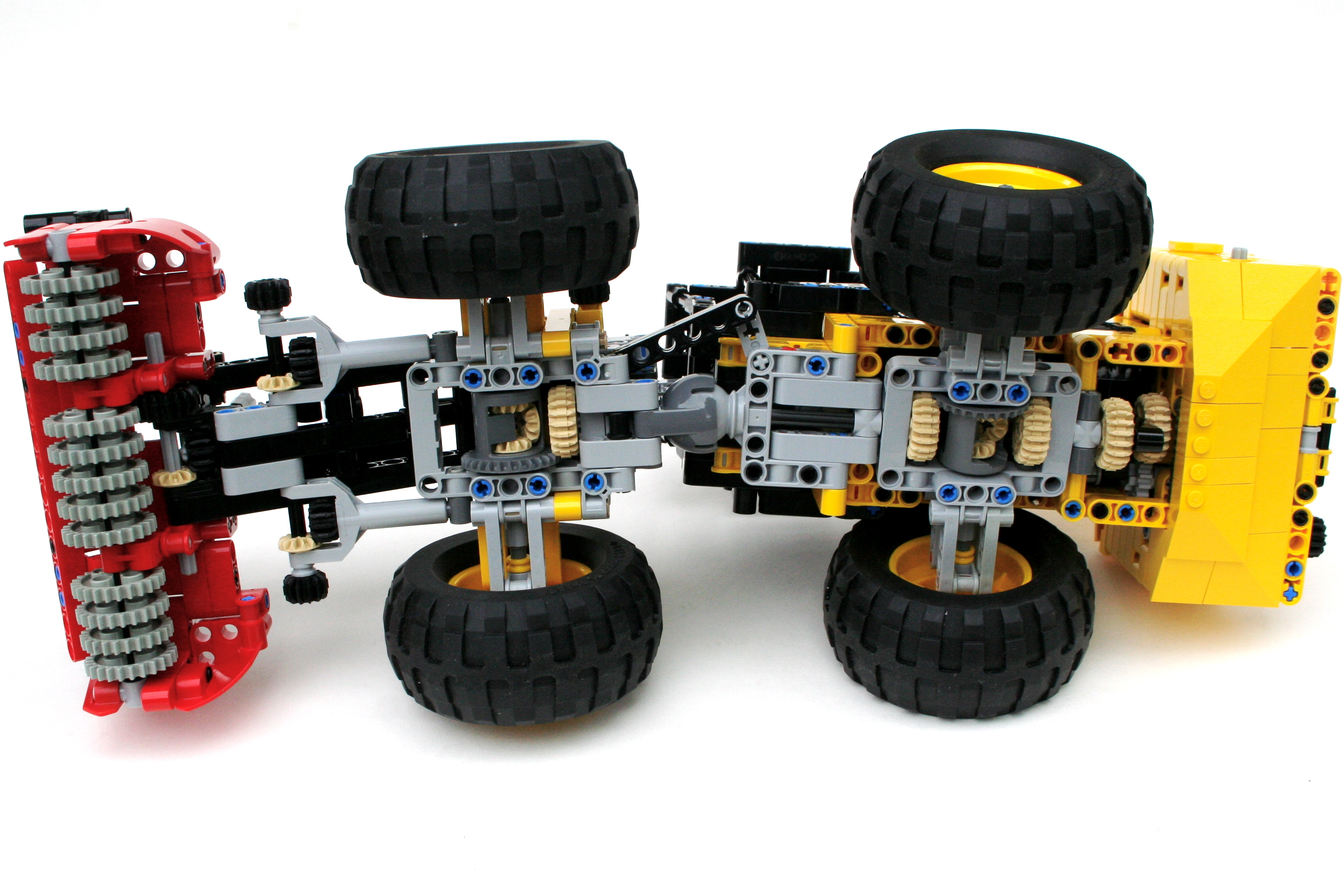
I started with the suspension for the tractor first. I did not have too much room to work with on the rear, so I set two differentials together, and connected them via two 20T gears. The rear one connects above to a 12T gear, which transmits rotation to the fake motor in the front. The two axle assembly pivots at this gear connection and connects to the rear wheels, so no u-joint is needed. The middle axle connects to the rear assembly through the differential connecting axle. This simple set-up allows for all four wheels to move freely, and independently.

I then added the front cab. It is not too complex with a differential fixed for the front axle, and a two-cylinder fake motor above it. A HOG gear is above the cabin which pulls a liftarm for the steering. A turntable is used to provide articulation between the cab and the rear chassis. Then a simple body was made, and off to the scraper.

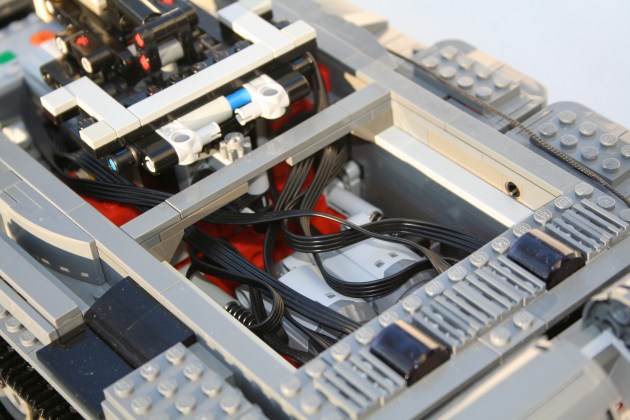
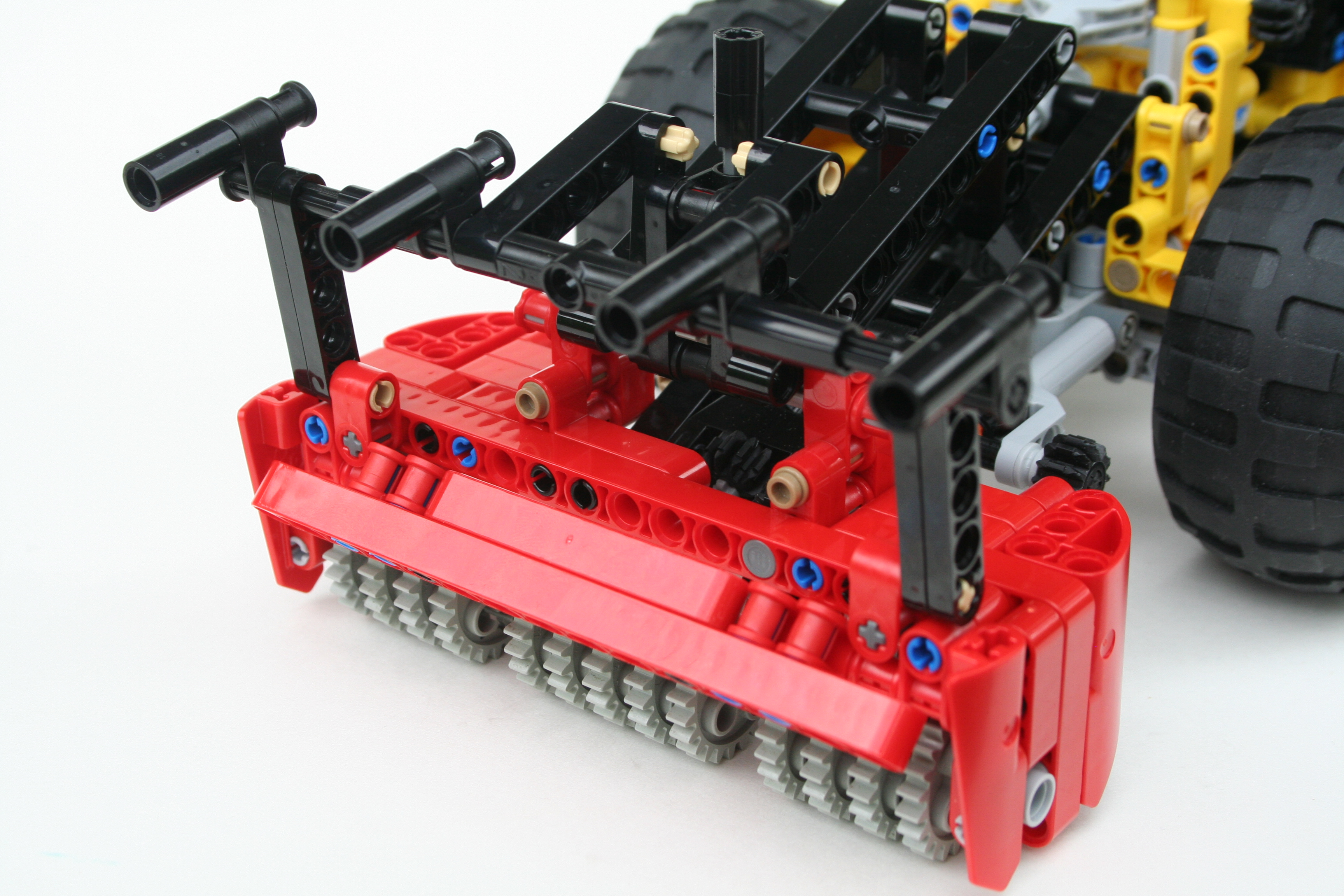
I then worked on the scraper part; kind-of. I knew when I started this project I would need a bunch of 1×6 arch bricks in yellow for the front gate. There are not many of them, so I started ordering them over the course of three months. As each would arrive, I worked on the scraper. I first set the dimensions and worked on the lifting mechanism. It was a little tricky to find the correct geometry while not taking too much room, and keeping the upper pivot point small while using to mLAs for the movement. I found a good solution, but a little more stiffness in the assembly would have been great. I added an extraction plate at the rear driven with a worm gear assembly resting between the rear wheels. Another stud of travel would be great, but it was not worth adding another four stud gear rack to make that happen. Finally, all the parts arrived for the front gate, so I installed it. Because the walls of the scraper are only one stud thin, I did not want to mess with the thickness of the sides to much by adding a mechanism for the gate movement. Each assembly I tried with a mLA or a worm gear set-up looked clunky or bulky. I ended up with a friction pin with a gear to move it. It is not very fancy, but it works well. At this scale, it is all that needed.

All in all, the MOC turned out OK. It would have been better to have a stiffer hitch arm, and I would have liked a different solution for the entry gate. I was pleased with the size, and I enjoyed packing a number of features into the small (but long) MOC. Finally, for some reason the MOC does not please my eyes as much as those first pictures I saw on diecastmodels.co. Maybe it just needs to be a little bigger.
Until the next one, Happy Building.